Différences entre les versions de « David Cazier CrowdSimulation »
| Ligne 19 : | Ligne 19 : | ||
{{Image_Cadre_Text|crowdOnFloor.png|left|170|Bâtiment composés d'étages superposés}} | {{Image_Cadre_Text|crowdOnFloor.png|left|170|Bâtiment composés d'étages superposés}} | ||
{{Image_Cadre_Text|CrowdOnPlanet.png|left|136|Foules sur une planète virtuelle}} | {{Image_Cadre_Text|CrowdOnPlanet.png|left|136|Foules sur une planète virtuelle}} | ||
| − | {{Image_Cadre_Text|crowdOnKnoth.png|left|136| | + | {{Image_Cadre_Text|crowdOnKnoth.png|left|136|Support de topologies extrême !}} |
<br clear="all"/> | <br clear="all"/> | ||
Version du 12 avril 2012 à 21:15
Accueil ||
Travaux de recherche ||
Projets et collaborations ||
Publications ||
Curriculum Vitae
Simulation de foules ||
Détection de collisions ||
Cartes multirésolutions ||
Reconstruction ||
Cartes non-variétés
Vidéos
- La vidéo présenté à la conférence international CASA 2012 4-JKC12 (International Conference on Computer Animation and Social Agents) est visible ici : Media:CrowdSimulation.ogv (présentation CASA'12) ou sur Youtube.
Simulation de Foules
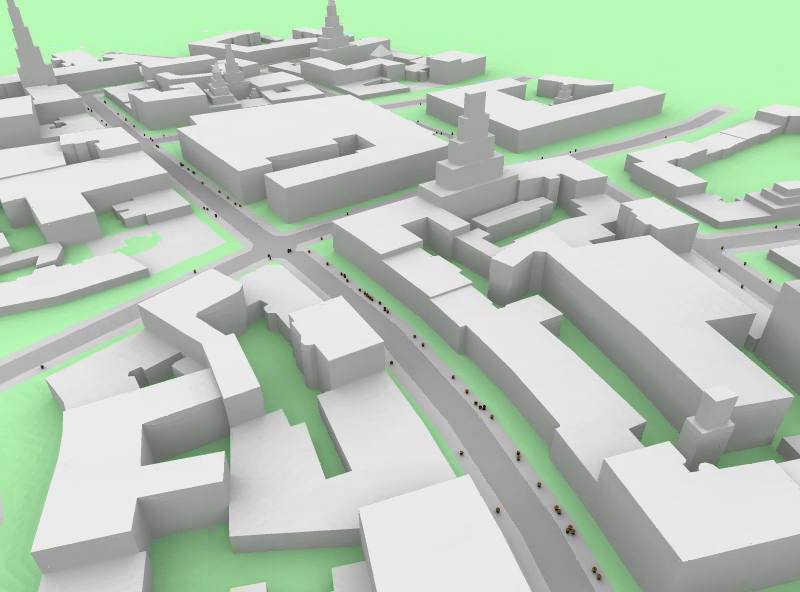
La simulation réaliste des foules est un élément important pour la production de mondes virtuels dans le domaine des jeux vidéos, du cinéma d'animation ou pour la planification architecturale et urbaine. Des problèmes difficiles doivent être abordées simultanément, comme des requêtes de proximités entre agents, l'évitement des collision avec les obstacles présents dans l'environnement ou la gestion d'environnements dynamiques complexes.
Nous avons mis au point un modèle unifié pour la simulation de foules dans des milieux urbains complexes 2-JKC12. En exploitant une approche multirésolution, nous avons développé des modèles topologique de terrain supportant différents niveaux de détails. Ils permettent des requêtes de proximité efficace et sont compatible avec les algorithmes de rendu en temps réel et la planification hiérarchique de trajectoires.

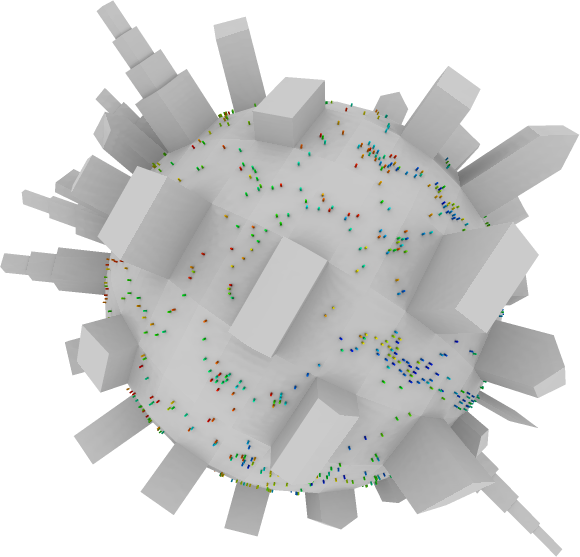

Une exploitation fine de l'aspect multi-échelles du modèle permet d'atteindre la même efficacité que les méthodes les plus rapide existantes. Par contre, la généricité de notre approche permet d'exécuter les simulations sur n'importe quelle variété de dimension 2, même non-planaire. Notre modèle topologique multirésolution définit de manière implicite une hiérarchie de graphes d'adjacence permettant d'exécuter des algorithmes de recherche de chemins multi-échelles.

Cette approche unifiée facilite la manipulation des environnements dynamiques. En effet, les changements géométriques ou tolopogiques dans l'environnement (ajout/suppression d'obstacles, transformation des chemins, ouverture de portes, etc.) sont directement pris en compte au niveau de la détection de collision.