IMAGES GALERIE DETAILS
Révision datée du 22 juillet 2009 à 11:26 par Fcordier (discussion | contributions)
Modélisation topologique multi-résolution (Pierre Kraemer)

Utilisation des MR-Maps dans un outil d'édition multirésolution avec des surfaces de subdivision multirésolution générées avec le schéma de Catmull-Clark (maillage carré).
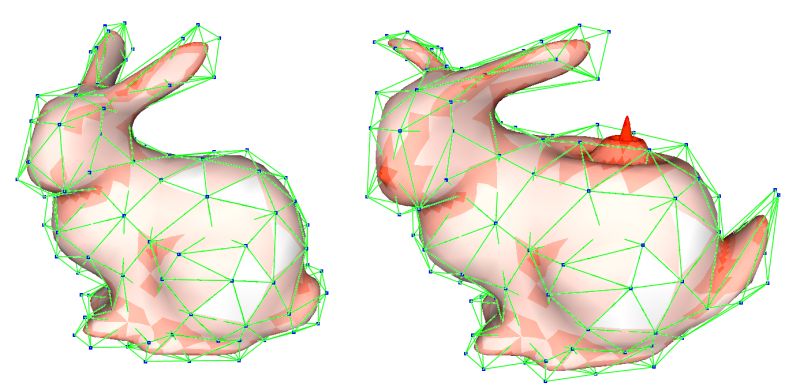
Utilisation des MR-Maps dans un outil d'édition multirésolution avec des surfaces de subdivision multirésolution générées avec le schéma de Loop (maillage triangulaire).
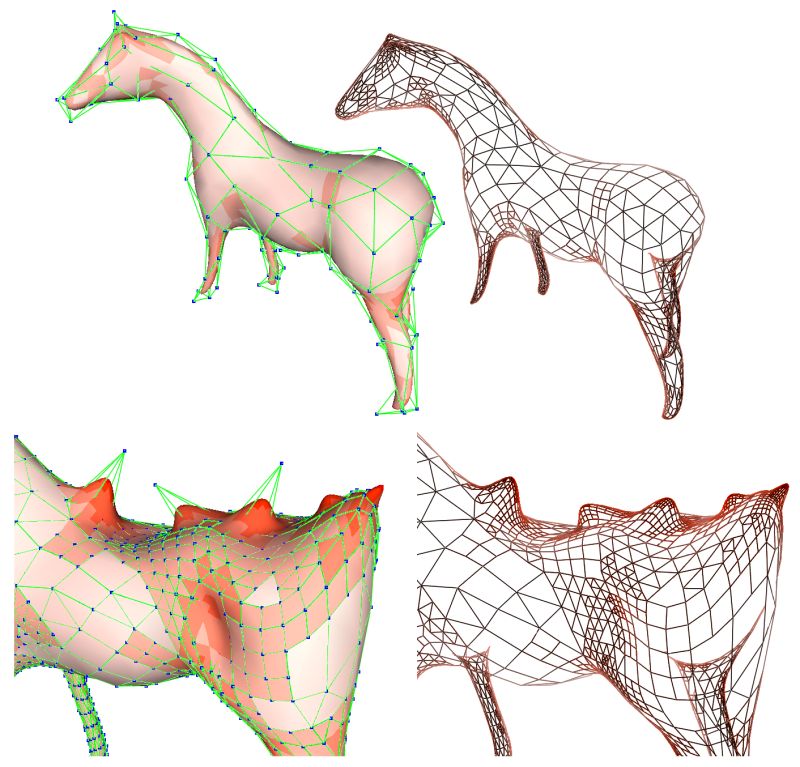
Utilisation des MR-Maps dans un outil d'édition multirésolution avec des surfaces de subdivision multirésolution générées avec le schéma Quad - Triangle (maillage hybride triangle - carré).
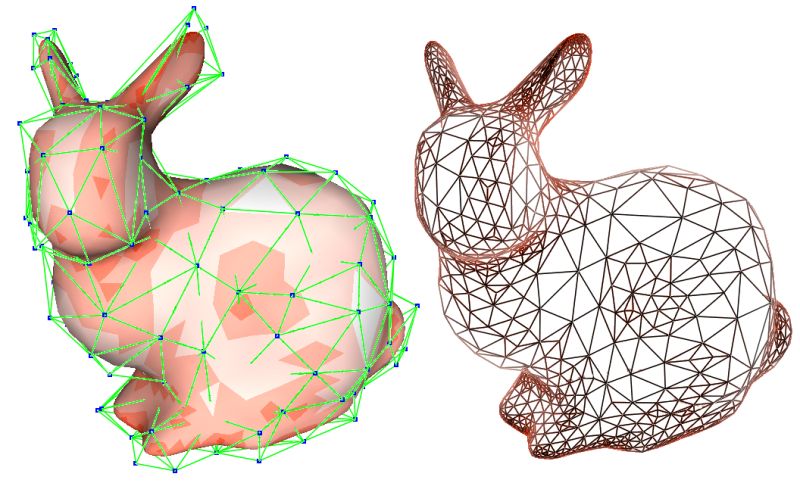
Utilisation des MR-Maps dans un outil d'édition multirésolution avec des surfaces de subdivision multirésolution générées avec le schéma Sqrt(3) (schéma de Kobbelt).
Reconstruction de maillages à partir d'images voxels (Dobrina Boltcheva)

Trois étapes clés de l'algorithme de reconsctruction Delaunay Discret a) Approximation discrète des régions de Voronoï sur la frontière discrète b) Graphe de Voronoï discret c) Reconstruction par dualité : graphe de Voronoi euclidien (en noir), t)
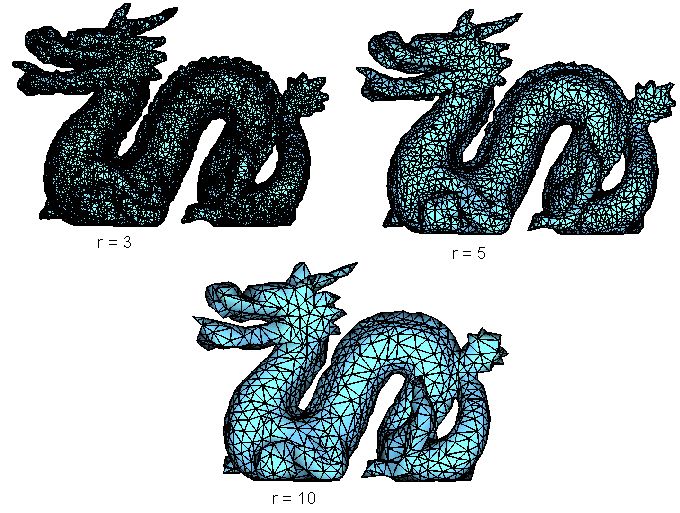
Reconstruction surfacique du fameux objet "dragon" avec trois résolutions différentes.
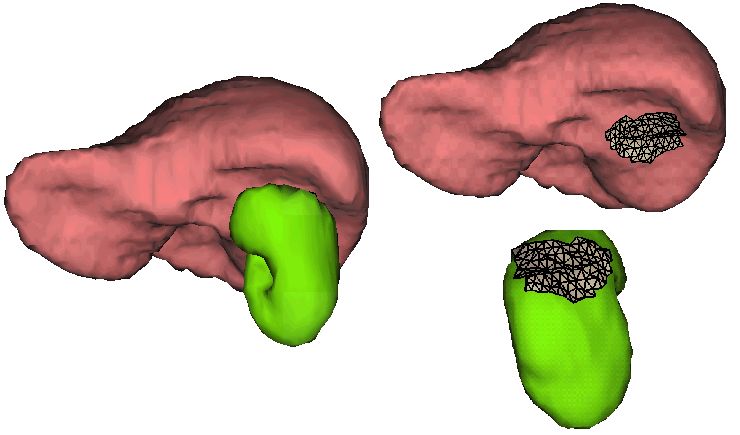
Reconstruction simultanée du foie et du rein droit. La frontière commune est contenue dans les deux maillages.

Exemple de reconstruction d'un squelette et d'une aorte.
Détection et caractérisation des poches dans les protéines (Benjamin Schwarz)
Étant donnée la structure d'une protéine, on recherche des cavités à l'aide d'algorithmes géométriques. Le formalisme géométrique permet une détection et une manipulation aisée des poches. On détermine par exemple les atomes participant de la périphérie de la poche, et donc susceptibles d'interagir avec un ligand. On peut en outre donner des valeurs de volume et d'aire de ces poches, utiles pour inférer la taille d'un ligand. La seconde partie du travail consistera à "habiller" les protéines et leurs poches à l'aide de patchs paramétriques pour donner une représentation lisse de leur surface.

Le domaine de liaison du ligand du récepteur à la vitamine D est représentée dans sa structure filaire, un polygone transparent met en évidence sa poche principale dans laquelle on peut distinguer un ligand modélisé par une union de sphères.
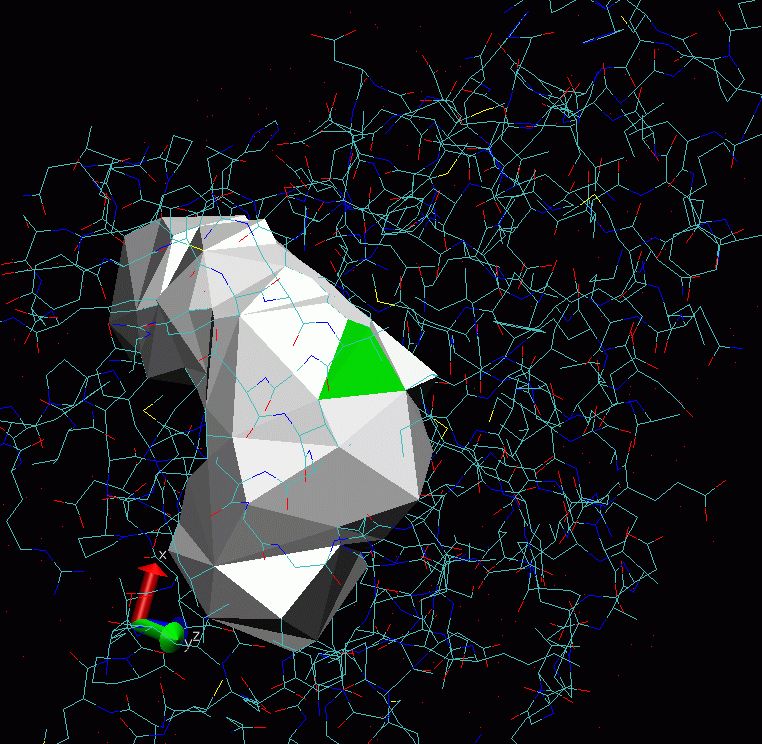
Même protéine même poche, sans transparence cette fois. Les facettes vertes représentent un passage bloqué entre deux poches voisines. Cette information permettra par exemple au biologiste d'étudier la possibilité de recruter cet espace vacant pour la synthèse d'un autre ligand.
Reconstruction d'objets numérisés par des scanners (Marc fournier)
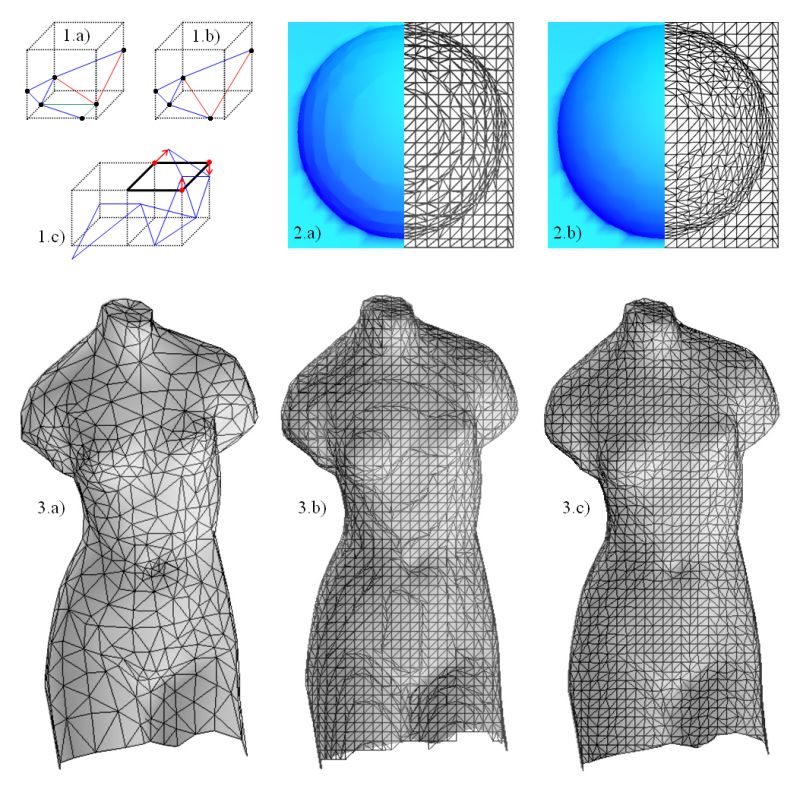
Adaptation du Marching Cube et nouvelle triangulation Marching Square pour la transformée en distance vectorielle: 1.a) illustre la triangulation Marching Cube (MC) standard de la transformée en distance scalaire (TDS) classique. 1.b) illustre l’algorithme MC équivalent à 1.a) et adapté à la transformée en distance vectorielle (TDV) où certains triangles peuvent être supprimés. 1.c) illustre la progression de la nouvelle triangulation Marching Square (MS) sur la grille de la TDV. 2.a) montre le résultat du MC sur la DTS pour le modèle d’une demi-sphère qui repose sur un plan. 2.b) montre le résultat beaucoup plus régulier du MC adapté sur la TDV pour le même modèle sans l’effet d’échelons du MC standard. 3.a) est le modèle initial connu sous le nom de Vénus. 3.b) correspond à la triangulation MC standard de la TDS du modèle initial et 3.c) correspond à la triangulation MS de la TDV du modèle initial. 3.c) est encore une fois beaucoup plus régulier, sans l’effet d’échelons non désiré et produit par des petits triangles dégénérés. 3.c) a également une meilleure représentation des bords au bas du modèle comparativement à 3.b) pour une même résolution de grille.
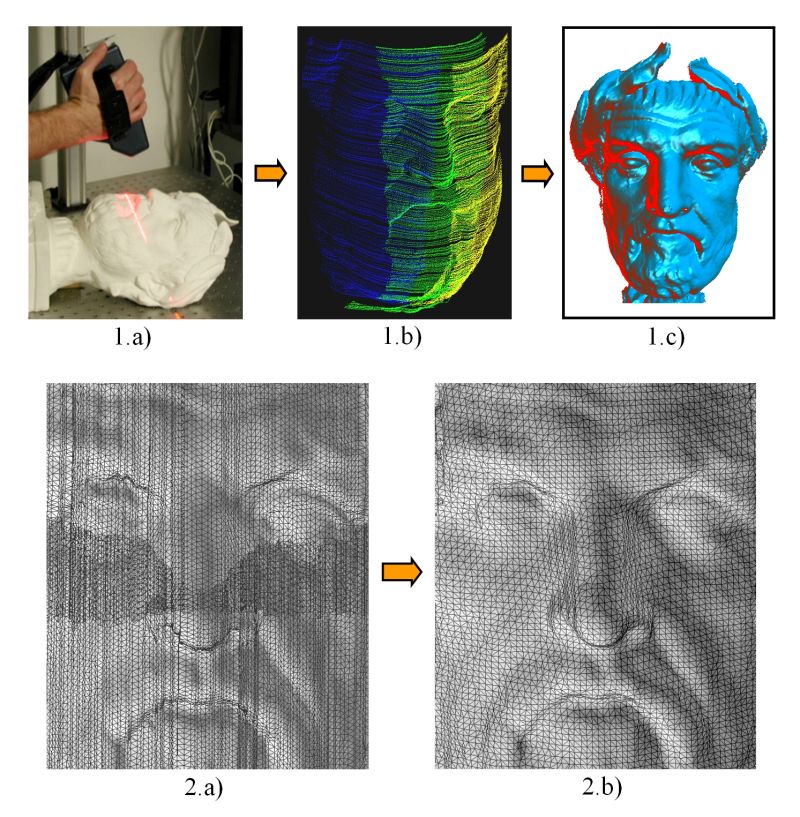
Fusion de maillages dans le domaine de la transformée en distance vectorielle: 1.a) montre l’acquisition de la surface d’un objet à l’aide d’un scanner 3D portable qui fonctionne par triangulation laser. 1.b) illustre les données brutes acquises suite à plusieurs scans avec redondance dans les zones de recouvrements. 1.c) correspond au résultat final triangulé suite à la fusion des données brutes dans le domaine de la transformée en distance vectorielle (TDV). 2.a) montre un agrandissement du modèle qui contient deux scans horizontaux avec recouvrement au centre. 2.b) est le résultat de la fusion dans le domaine de la TDV et triangulé avec l’algorithme du Marching Square.
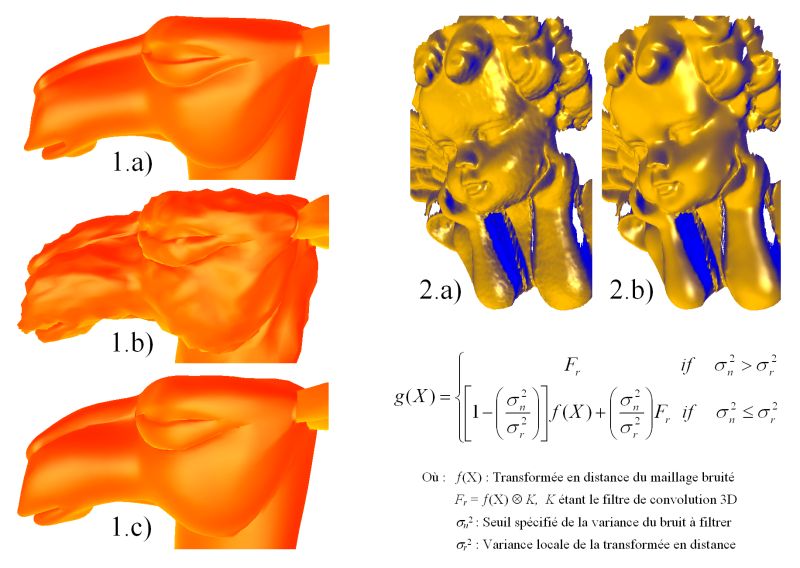
Filtrage adaptatif de maillages dans le domaine de la transformée en distance vectorielle: Filtrage adaptatif de maillages dans le domaine de la transformée en distance vectorielle 1.a) est le modèle initial de référence, 1.b) est le modèle artificiellement bruité et 1.c) est le modèle filtré résultant de l’algorithme de filtrage adaptatif appliqué à la transformée en distance vectorielle (TDV) du modèle bruité. Cette procédure de bruitage artificiel est utilisé pour comparer le résultat au modèle initial afin d’évaluer la qualité du filtrage et de la comparer à d’autres algorithmes de filtrage de maillage. 2.a) est un modèle numérisé qui contient du bruit introduit par le scanner 3D à l’étape d’acquisition des données. 2.b) est le modèle dont le bruit a été réduit par filtrage adaptatif de la transformée en distance vectorielle (TDV) du modèle bruité. L’équation du filtre adaptatif appliqué à la TDV est présentée et dans le cas où la variance du bruit est plus petite ou égale à la variance locale, l’équation est une sommation sur un premier terme de conservation des caractéristiques géométriques du maillage ainsi que sur un second terme de filtrage du bruit présent dans les données.
Visualisation d'objets numérisés par scanner (Frederic Larue)

Le phénomène de réfraction est ici assimilé à un champ de distortion qui dépend du point de vue. Ce champ est pré-calculé sur toute la surface de l'objet par un lancé de rayons et compressé à l'aide d'harmoniques sphériques. Au moment du rendu, les fonctions harmoniques sont directement évaluées par le matériel graphique et permettent de retrouver le rayon sortant de l'objet pour n'importe quel point de la surface et sous n'importe quel point de vue, permettant ainsi une visualisation temps réel.

La restitution de copies numériques fidèles aux originaux en termes de réalisme passe par la capture de la forme et de l'apparence de ces objets. Nous avons proposé une méthode permettant d'automatiser certaines des étapes nécessaires à l'acquisition de ces deux informations. A gauche, une photographie de l'objet original. Au milieu, la géométrie de cet objet reconstruite à partir de 5 acquisitions. A droite: le rendu d'une copie synthétique de cet objet numérisé avec sa forme et son apparence.

La restitution de copies numériques fidèles aux originaux en termes de réalisme passe par la capture de la forme et de l'apparence de ces objets. Nous avons proposé une méthode permettant d'automatiser certaines des étapes nécessaires à l'acquisition de ces deux informations. A gauche, une photographie de l'objet original. A droite: deux vues synthétisées à partir de la copie numérique de ce même objet.
Visualisation volumique accéléré par GPU (Lucas Ammann)
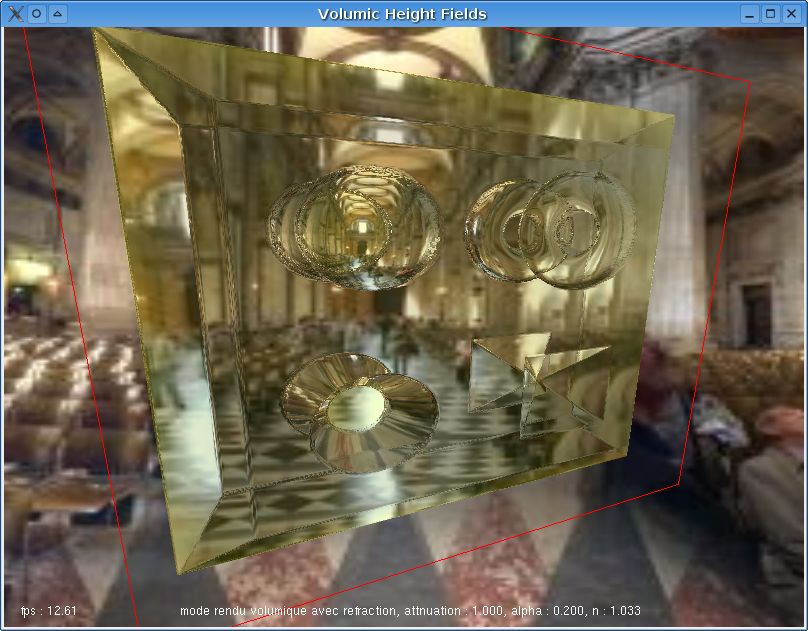
Rendu d'objet transparent via un algorithme dérivé des algorithmes de relief mapping, assimilable à un lancé de rayons sur un champs de hauteurs. En effet, l'objet est simplement représenté par une combinaison de cartes de hauteurs. Cette technique permet de rendre l'objet avec uniquement un simple quadrilatère ce qui évite le recours à un maillage trop complexe. La parenté avec les algorithmes à lancé de rayons permet également d'inclure les effets de réfraction et d'atténuation de la lumière au sein de l'objet. L'exploitation des materiels graphiques modernes permet d'obtenir des temps de rendu intéractif.
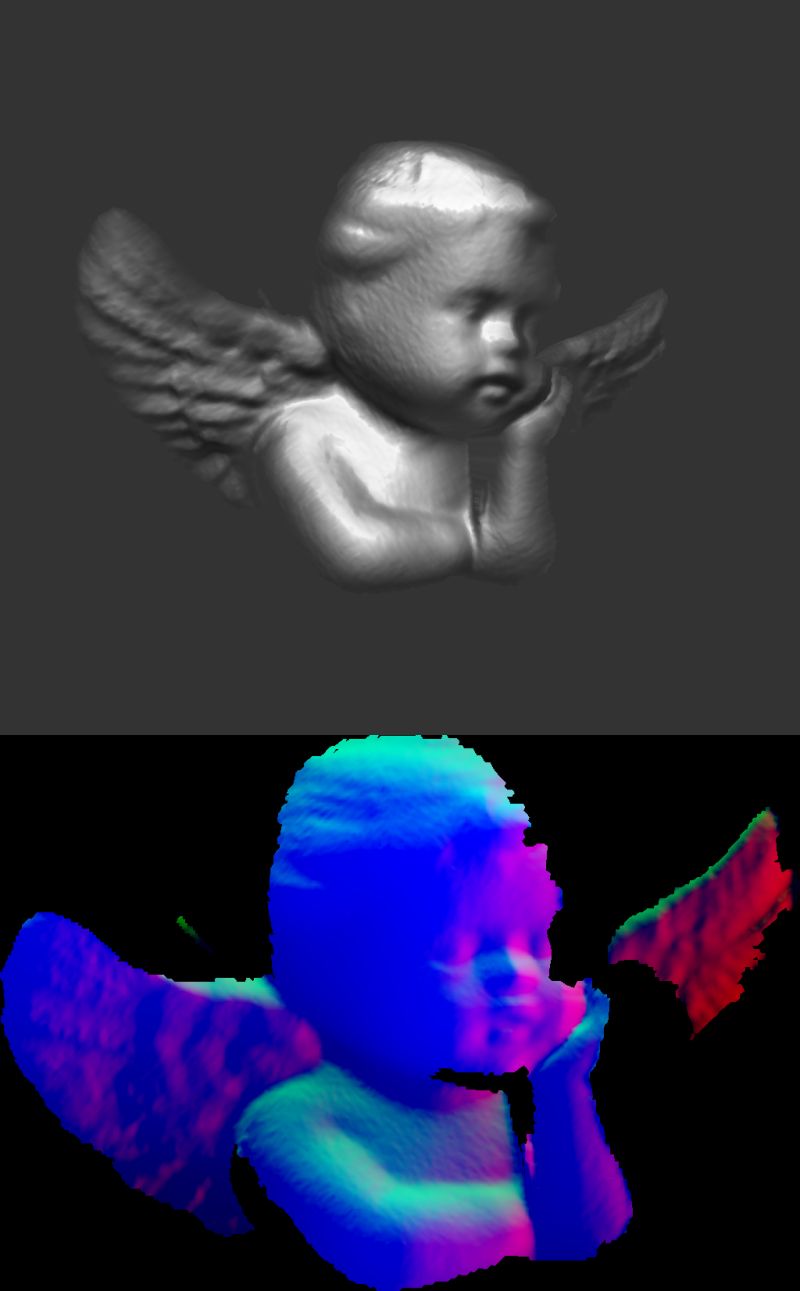
Rendu d'un objet scanné via un algorithme de relief mapping. L'aquisition en 3 dimensions d'objet réel génère un volume important de données. Les maillages générés sont souvent extrement lourds et leur temps de reconstruction non négligeable. Deplus, les données issues des scanners sont souvent en 2 dimensions et demi. On s'attache ici à visualiser l'objet directement en exploitant ces données issues de scanner 3D sans utiliser le maillage reconstruit de l'objet. L'algorithme employé ici est basé sur un algorithme de relief mapping. Un simple cube sert de base au rendu. L'image supérieur montre le rendu obtenu tandis que l'image inférieur montre la carte de hauteurs et de normales employée pour le rendu.
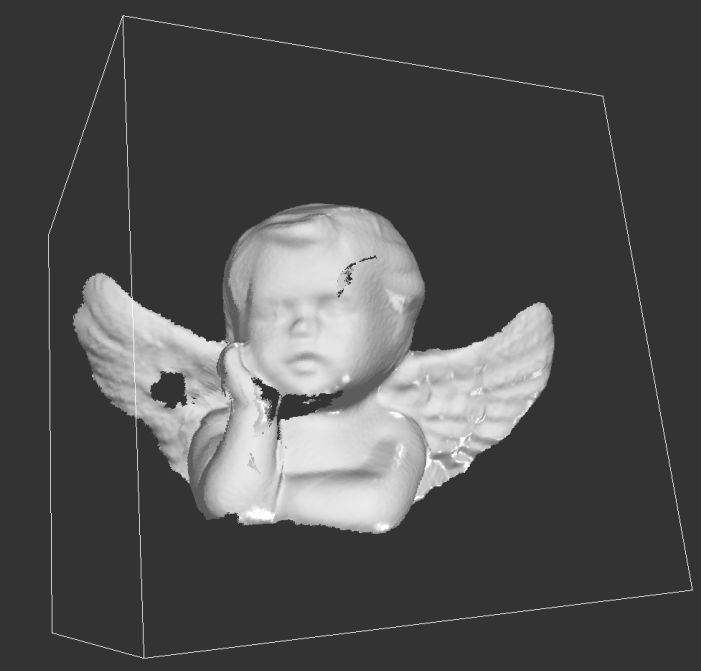
Rendu via un algorithme de relief mapping, d'un objet complet scanné. La numérisation d'objet implique souvent d'avoir recours à plusieurs scans pour un seul et même objet. Après recalage des différents scans, on visualise directement les données : aucun maillage complexe n'est utilisé. En effet, seul un cube sert de support au rendu. L'algorithme est basé sur un algorithme de relief mapping dans lequel sont combinées les données issues des différentes phases de numérisation.
Planification d'ablations par radiofréquence (Caroline Essert & Claire Baegert)
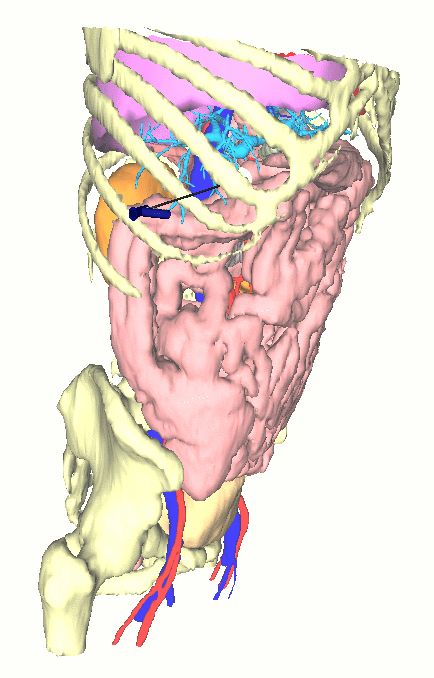
calcul automatique du placement optimal d'aiguille de radiofréquence, affichage avec transparence de la peau et du foie
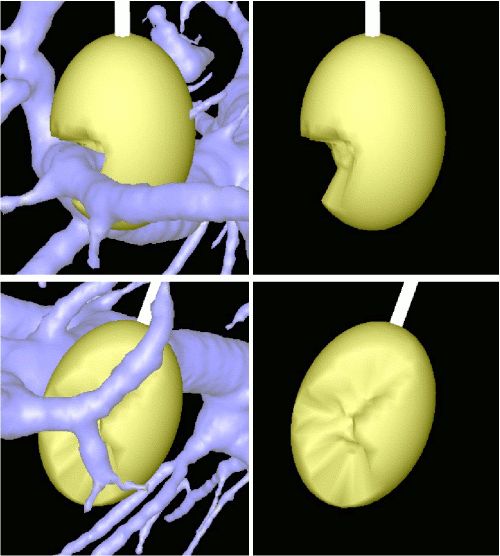
calcul de déformation de la zone de lésion de radiofréquence à proximité des vaisseaux sanguins

subdivisions des triangles à la frontière des zones candidates pour l'insertion d'aiguille de radiofréquence
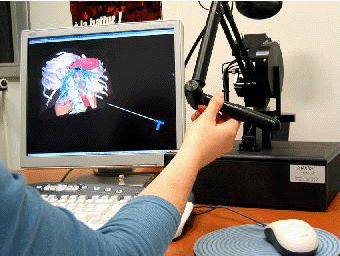
retour d'effort pour la simulation réaliste du geste chirurgical dans l'application de radiofréquence
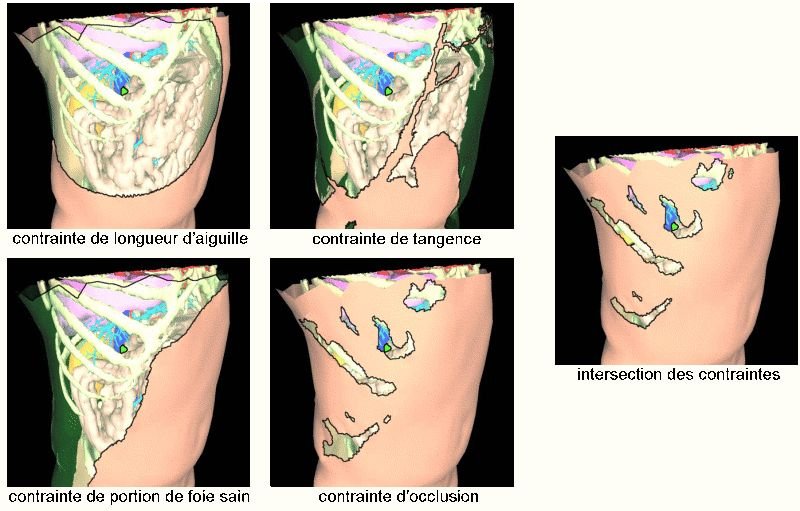
visualisation de 4 contraintes strictes sous forme de zones d'insertion, et leur intersection, dans l'application de radiofréquence
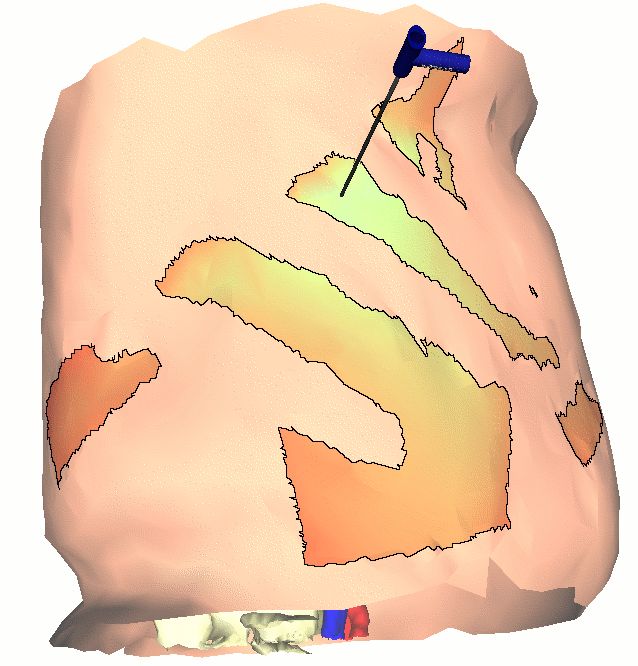
zone candidate pour l'insertion d'aiguille de radiofréquence, avec coloration des zones selon les contraintes souples

fusion de 3 contraintes souples, représentées sous forme de colorations des zones candidates pour l'insertion d'aiguille de radiofréquence

l'application de radiofréquence sur station de réalité virtuelle
Spécification des hypercartes, preuves du théorème du genre et de la formule d'Euler
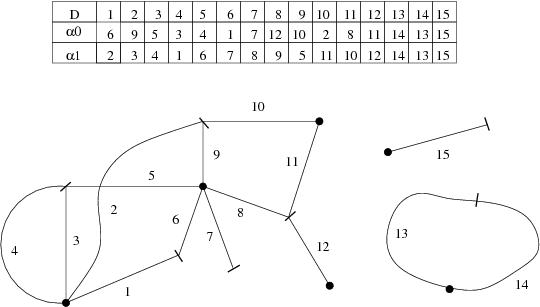
Hypercarte de genre 1 plongée dans le plan avec auto-intersection
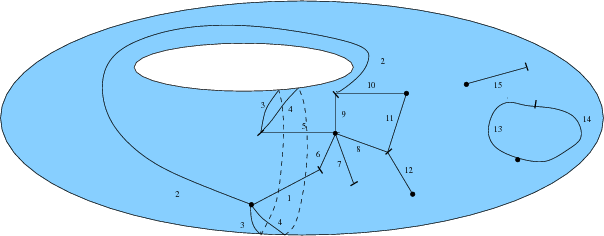
La même hypercarte plongée sur un tore (genre 1) sans auto-intersection

Subdivisions d'un cube et d'un tore avec les hypercartes correspondantes
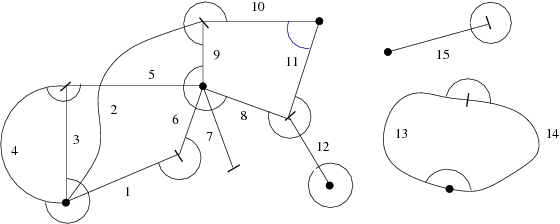
Hypercarte avec des sommets et des arêtes ouvertes (« quasi-hypercarte »)
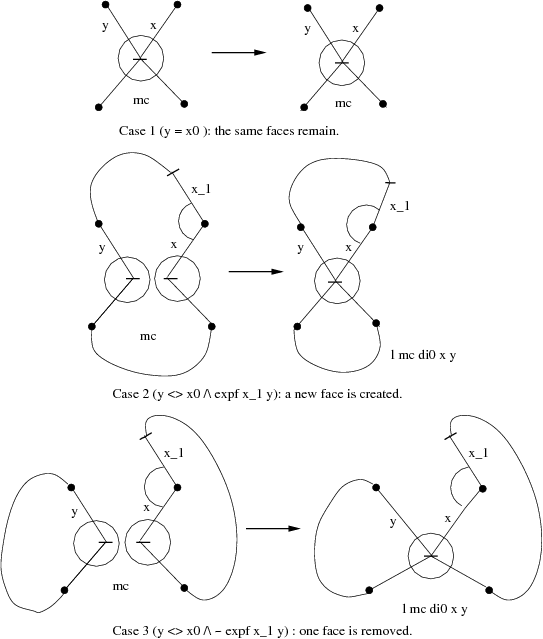
Définition constructive des faces d'une hypercarte selon 3 cas de coutures d'arêtes
Certification d'une opération de segmentation d'images 2D modélisées par des hypercartes colorées
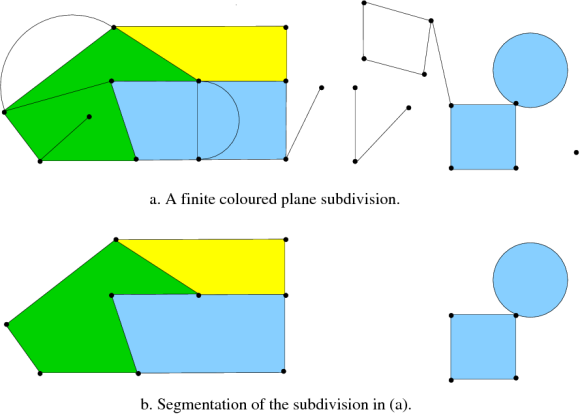
Une subdivision du plan colorée (avec un sommet isolé et des arêtes pendantes) et sa segmentation
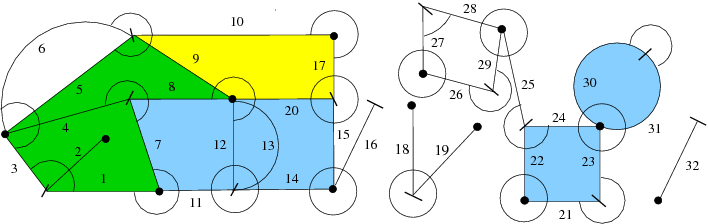
Modélisation de la subdivision précédente par une quasi-hypercarte (sommets ou arêtes ouverts)
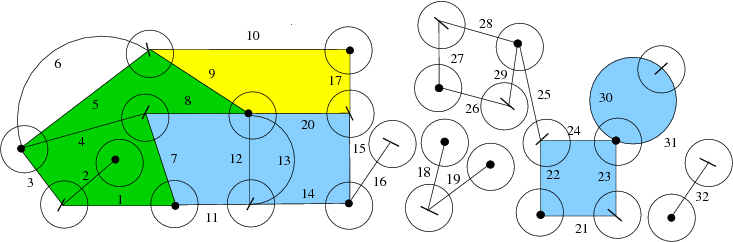
Modélisation de la subdivision précédente par une hypercarte (sommets et arêtes fermés)

Segmentation de la quasi-hypercarte en 2 phases (des défauts subsistent)

Segmentation de l'hypercarte en 2 phases (le résultat est correct)
Installation matériel RV

SPIDAR installé sur le workbench
Modélisation des vaisseaux sanguins
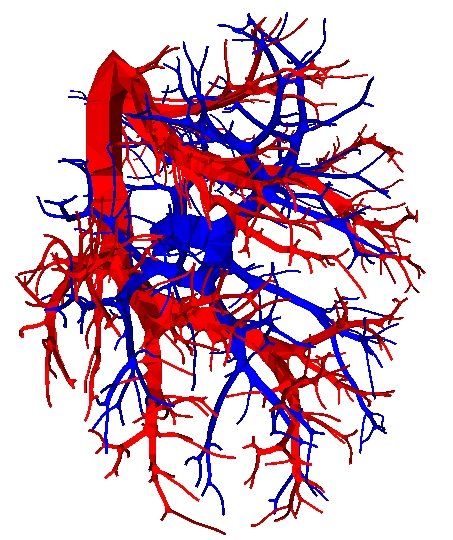
Réseau vasculaire du foie reconstruit (topologiquement)
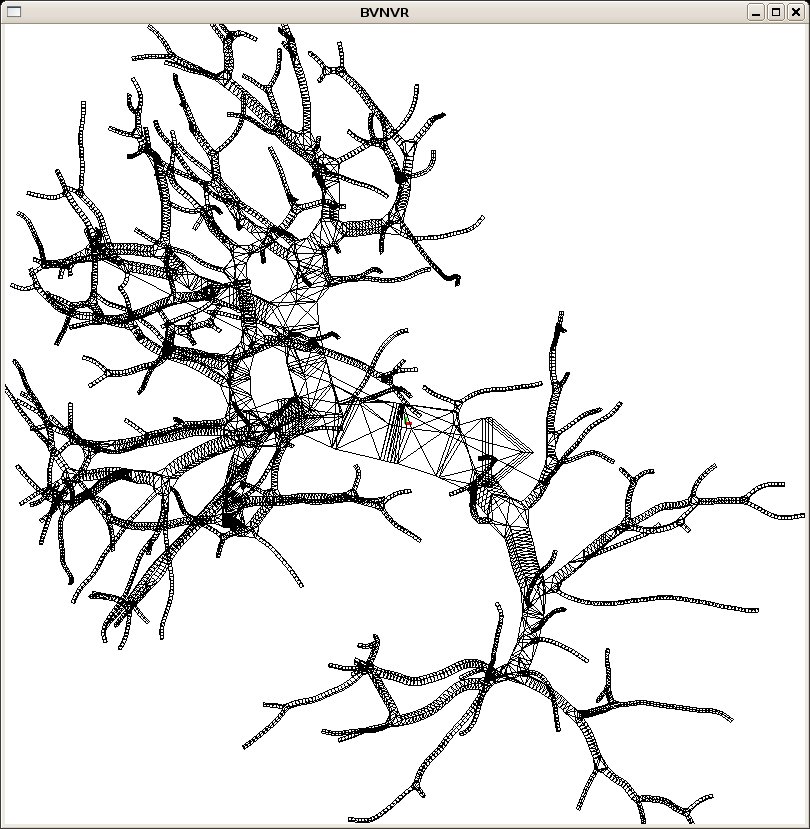
Réseau vasculaire reconstruit (topologiquement)