ExRealis
Plateforme de Numérisation IGG
L'objectif de cette plateforme est d'offrir un certain nombre de techniques (équipements et logiciels) permettant la mesure de données réelles en vue de leur utilisation pour des applications en synthèse d'images et de réalité virtuelle. Le spectre des données qui peuvent être capturées est large et comprend:
- la forme d'objets i.e. leur géométrie,
- l'apparence d'objets dans un environnement lumineux ou les caractéristiques de matériaux complexes,
- les mouvemements complexes d'objets ou d'humains.
Au lieu d'avoir une personne qui créé un modèle polygonal d'un objet existant, nous souhaitons pouvoir directement acquérir ce modèle à partir de la réalité. A ce jour il existe beaucoup de techniques et d'équipements (comme les scanners 3D) permettant de faire des numérisations. Mais ces techniques ont souvent des limitations importantes: leur utilisation requiert un degré important d'expertise, plusieurs étapes nécessitent des interventions manuelles fastidieuses, les modèles obtenus sont de très grande taille et impossible à rendre en temps réel directement sur carte graphique, etc.
La plateforme de numérisation IGG couvre les trois aspects suivants:
- acquisition de modèles avec apparence par des dispositifs dédiés,
- traitement automatiques ou semi-automatiques des modèles (recalage, filtrage, fusion, reconstruction, simplification et représentation adaptée à l'application),
- outils de rendu spécifiques sur GPU.
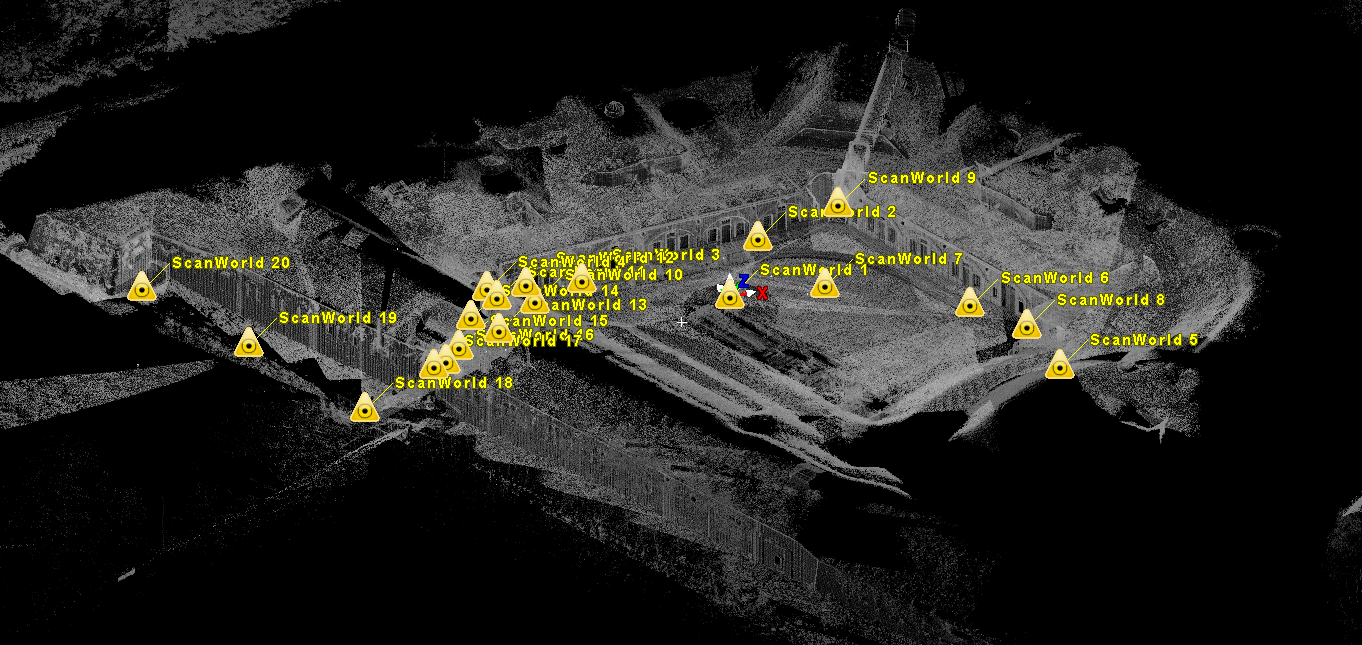
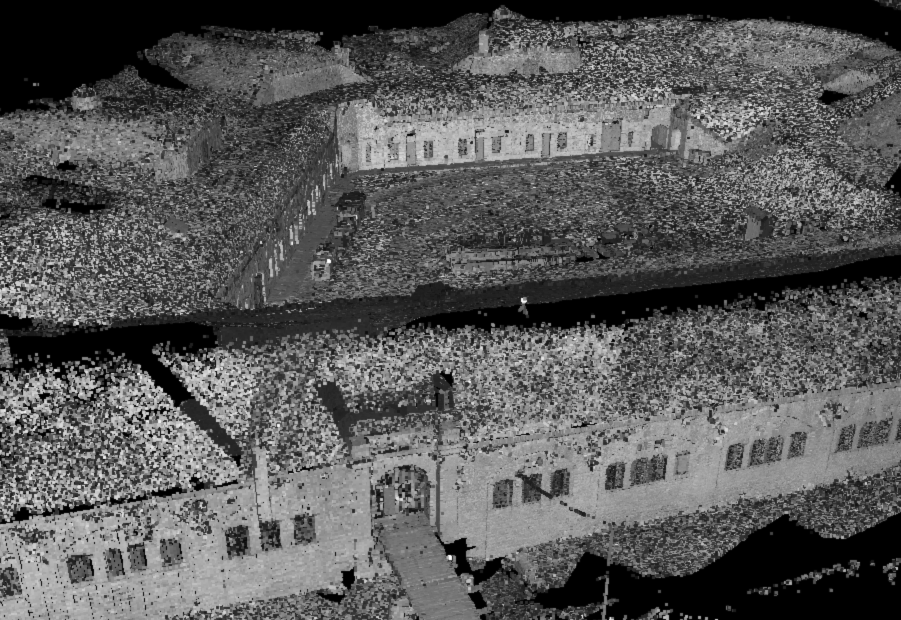
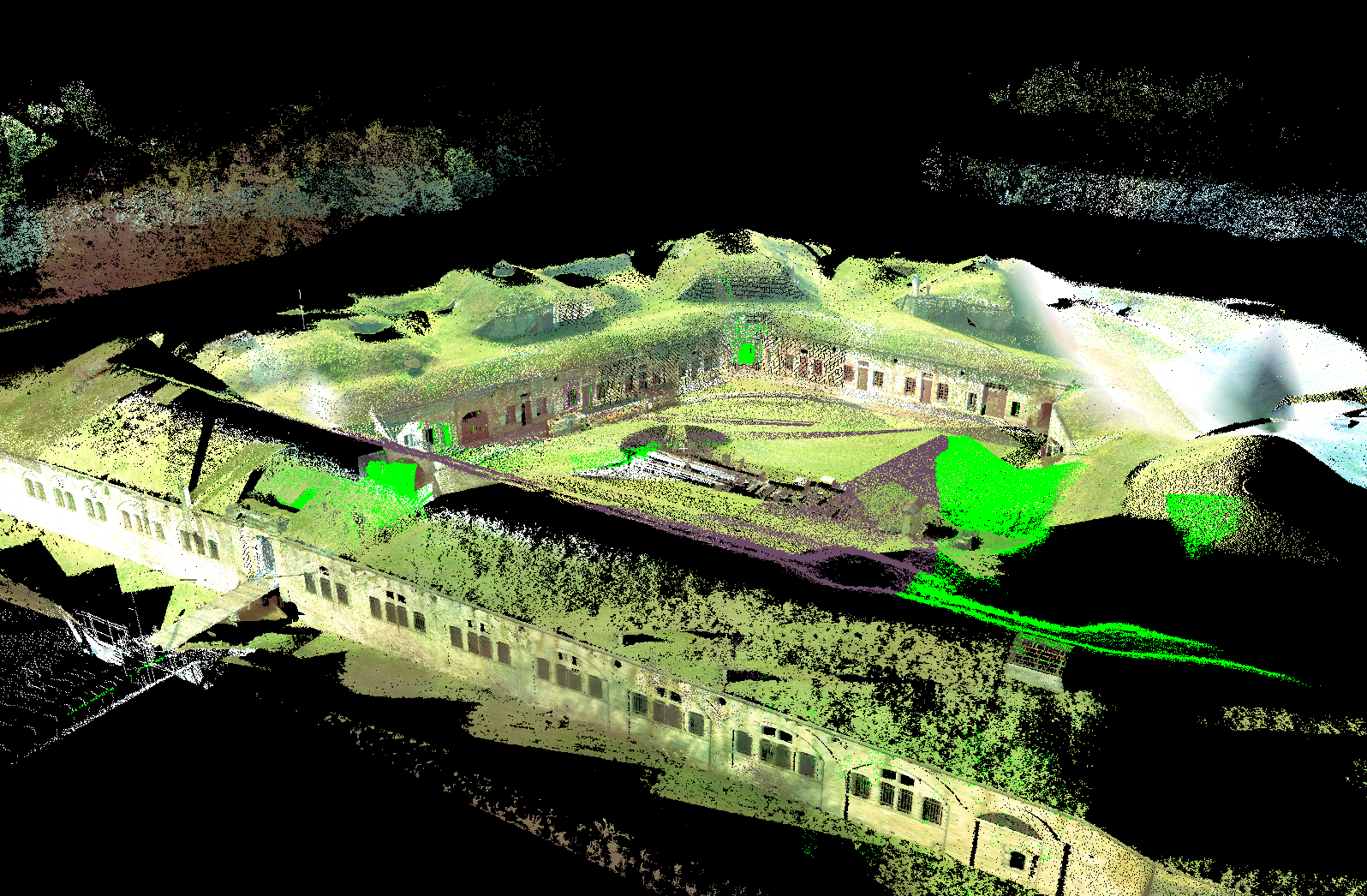
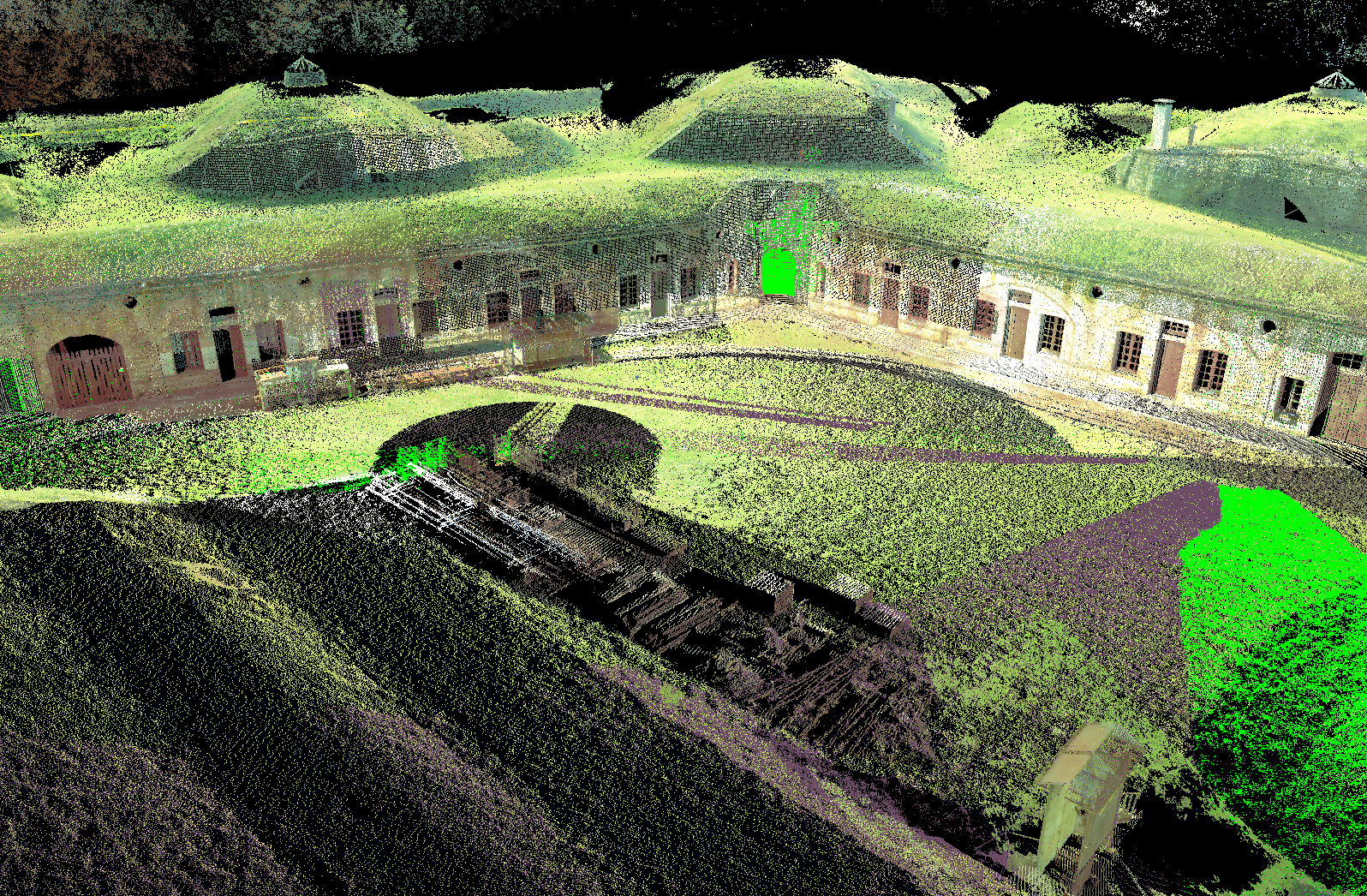
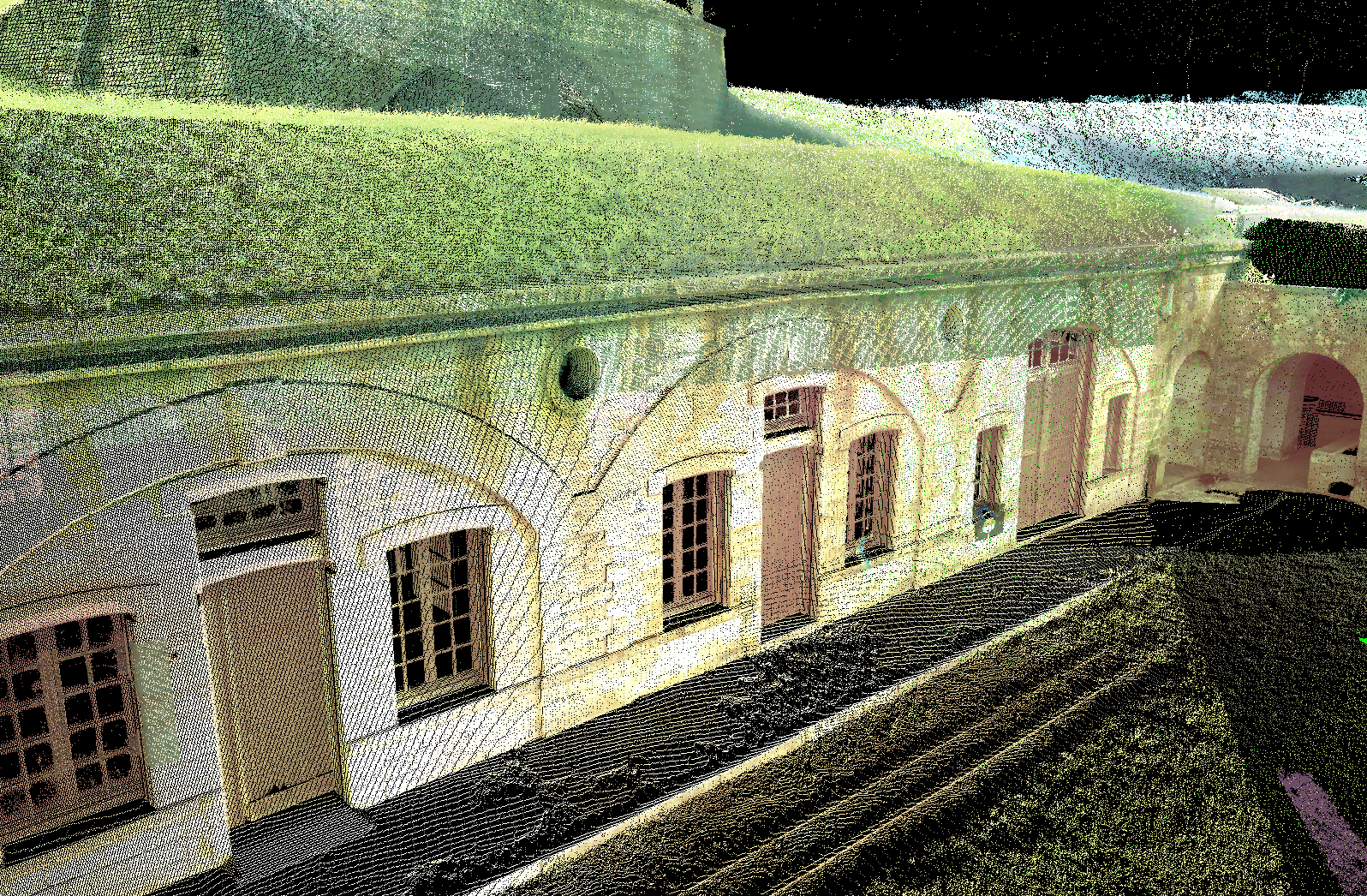
Ci-dessous, quelques rendus issus de la numérisation d'une partie du Fort de Bois l'Abbé (48°12'16.3"N 6°24'00.8"E), situé à Uxegney près d'Epinal. Le modèle final compte environ 63 millions de points, capturés à l'aide du scanner Leica Scanstation 2 depuis 20 positions différentes du scanner sur le site. Les couleurs replaquées sur les points sont issues de la caméra interne du scanner, destinée à la manipulation et non à une capture fidèle de l'apparence du site.


Ci-dessous, un exemple de numérisation de tableau. L'image de gauche montre une photographie du tableau, l'image du milieu un rendu en synthèse d'images pour le même point de vue en utilisant un placage de texture de couleur classique et l'image de droite en utilisant une fonction bidirectionnelle de texture de laquelle le relief a été découplé de la réflectance bidirectionnelle.

Equipements
Scanner optique par projection de franges et mesure de décalage de phase.
Ce dispositif permet l'acquisition 3D d'objets d'une taille comprise entre environ 10 et 50cm. Une caméra externe permet d'effectuer un recalage automatique de plusieurs prises de vues ainsi que la superposition d'une information d'apparence directionnelle de couleur RVB. Un logiciel spécifique a été développé pour faire des acquisitions et des restitutions sur écran.
Goniomètre.
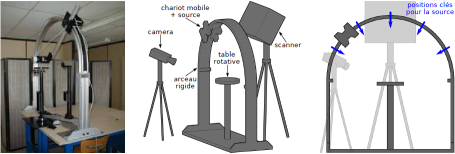
Ce dispositif permet le positionnement d'une source lumineuse sur un dôme hémisphérique pour faire varier l'éclairage d'un objet 3D ou d'un échantillon de matériaux d'une taille comprise entre environ 10 et 20cm. Ce dispositif sera complété en fin d'année 2009 par un second arceau mobile en rotation pour permettre le positionnement d'une caméra sur un dôme hémisphérique.
Ce dispositif, bien qu'actuellement encore incomplet, a été utilisé pour faire l'acquisition de tableaux avec fonction bidirectionnelle de texture.
Laser scanner moyenne portée.

Il s'agit d'un laser ScanStation2 de Leica Geosystems. Il permet d'effectuer des scans sur une portée de 0.2 à 300m avec une vitesse allant jusqu'à 50000 points/sec. Un jeu de cibles permet également de faire du recalage. Voir également la fiche technique de Leica Geosystems.
Ce scanner laser a servi à numériser une partie du Fort de Bois l'Abbé près d'Epinal.
Matériel photographique

Ce matériel photographique semi-professionnel est principalement dédié à la capture d'apparence. La duplication d'une partie du matériel (boîtiers Canon EOS 5D MkII et paires d'objectifs 24mm, 50mm, 135mm) permet également la capture de paires d'images stéréo.
Système de capture de mouvements
Ce matériel autorise l'acquisition des mouvements d'objets ou d'humains dans l'espace. Il s'agit d'un système de capture optique de grande précision (5 caméras IR Vicon T40, 4Mpixels à 370 Hz) capable de capturer les trajectoires de marqueurs portés par les sujets dont les mouvements sont à numériser. Des trajectoires sont ensuite reconstruites (logiciel Vicon Blade) et peuvent éventuellement servir à animer des personnages.
Logiciels
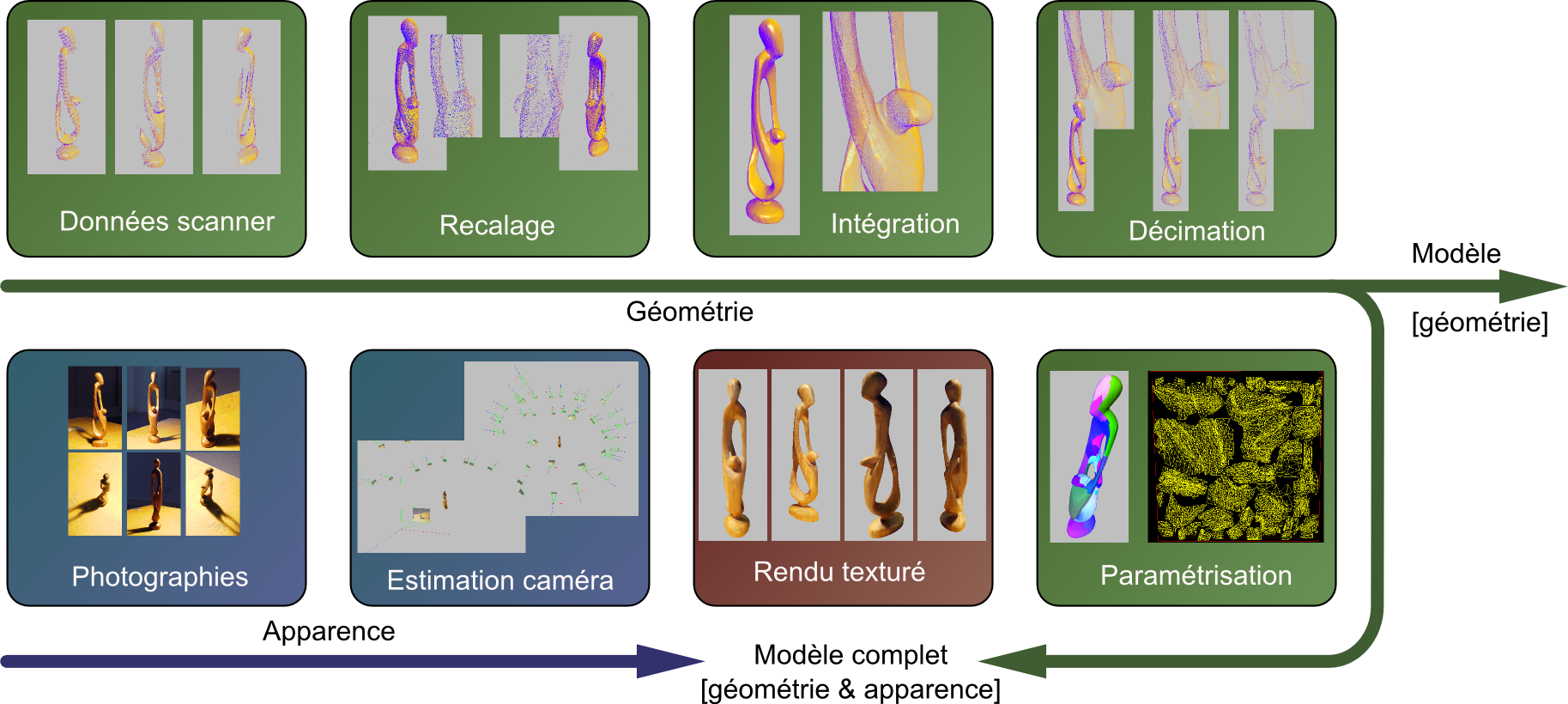
Un développement logiciel a été mené dans le but d'intégrer l'ensemble des traitements utiles à la création de modèles numériques réalistes à partir des objets physiques réels. Ce développement couvre:
- le traitement de la géométrie acquise pour reconstruire des maillages exploitables à partir de nuages de points;
- l'exploitation de photographies pour reconstituer l'apparence sous forme de lightfield.
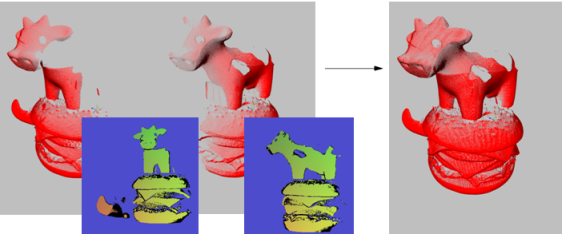
Recalage, Débruitage, Intégration, Simplification.
Beaucoup d'interventions manuelles sont nécessaires pour aller des données brutes (nuages de points) vers un modèle géométrique complet de l'objet. Nous développons des outils permettant d'automatiser (ou de rendre plus accessible) ce travail.
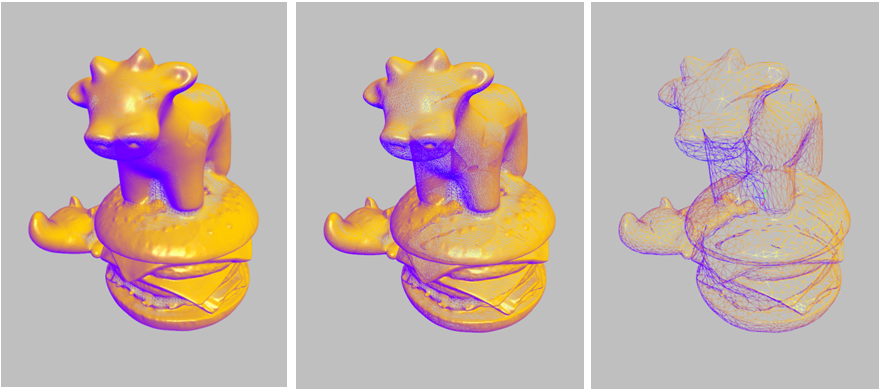
Exemple de recalage, débruitage et simplification:

Texture, Apparence, Rendu.
Acquérir l'apparence d'un objet réel est un problème difficile. De nombreuses photos doivent être prises et recalées avec le modèle 3D. Nous proposons des outils permettant de faciliter ce travail et de rendre compatibles les représentations avec les capacités des cartes graphiques actuelles.


{kind=link}
Collaborations
- La plateforme de numérisation IGG s'inscrit dans la plateforme de numérisation et de modélisation 3D de l'Université de Strasbourg.
- Plusieurs projets nationaux et régionaux sont associés à cette plateforme: ANR ATROCO, Ministère RIAM AMI3D, Région Pôle Image