Différences entre les versions de « InVirtuo »
| Ligne 2 : | Ligne 2 : | ||
__NOEDITSECTION__ | __NOEDITSECTION__ | ||
| − | = l'expérience virtuelle | + | = ''L'expérience virtuelle'' = |
| + | La plateforme de réalité virtuelle IN VIRTUO ''l'expérience virtuelle'' offerte par le LSIIT s'appuie principalement sur la mise à disposition de ressources matérielles, sous la forme: | ||
| + | * d'un plan de travail virtuel immersif (workbench); | ||
| + | * d'un mur immersif augmenté d'un périphérique haptique de grande taille (robot à câble); | ||
| + | * de périphériques haptiques individuels pour stations de travail. | ||
| − | [[Image:WBGeneralSide.jpg|left| | + | [[Image:WBGeneralSide.jpg|left|250px]] |
| − | |||
| − | En effet, outre les problématiques de développement des applications liées aux spécificités matérielles, tirer parti de ces environnements immersifs requiert une refonte complète de l'ergonomie des applications, et de l'interaction homme-machine. Pour combler le manque d'outils, de standards, et techniques existants, | + | Ces matériels sont complétés par la mise à disposition d'outils logiciels permettant d'en tirer le meilleur parti. En effet, outre les problématiques de développement des applications liées aux spécificités matérielles, tirer parti de ces environnements immersifs requiert une refonte complète de l'ergonomie des applications, et de l'interaction homme-machine. Pour combler le manque d'outils, de standards, et techniques existants, des développements logiciels issus des recherches de l'équipe IGG dans le domaine de l'interaction en environnement immersif sont égelement mis à disposition. |
| − | = | + | |
| + | == Workbench == | ||
[[Image:WBGeneralFrontRight.jpg|right|200px]] | [[Image:WBGeneralFrontRight.jpg|right|200px]] | ||
| − | + | Le workbench est un dispositif de réalité virtuelle immersive avec une configuration bien adaptée aux tâches de manipulation et d'interaction à distance humaine. La configuration mise à disposition offre deux écrans d'environ 2m de diagonale chacun avec un affichage en stéréoscopie active immerif grâce à lun système decapture des mouvements de l'utilisateur. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | Ce dispositif de visualisation immersive est assorti de plusieurs périphériques | + | Ce dispositif de visualisation immersive est assorti de plusieurs périphériques (joystick ou manettes présentant un ensemble de boutons, deux gants de données, capables de mesurer la flexions des doigts de l'utilisateur, ainsi que le contact). Un robot à câbles SPIDAR, capable de restituer une force à son utilisateur est également disponible sur cette configuration. |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | Initiallement installé et géré par le 'Centre d'Etude du Calcul Parallèle et de la Visualisation' de l'ULP en février 2002, le matériel disponible a largement évolué et se trouve aujourd'hui majoritairement opéré par l'équipe [[Accueil|IGG]] du LSIIT. En effet, fin 2007, le système de projection a été entièrement renouvellé grâce au financement du CPER IRMC thème Réalité Virtuelle. Son accès reste toujours libre à l'ensemble de la communauté des chercheurs de l'Université de Strasbourg. | ||
| − | |||
| − | + | == Mur immersif visuel & haptique == | |
| − | + | <span style="color:red;"> | |
| + | --- | ||
| + | Illustrations | ||
| + | --- | ||
| + | </span> | ||
| + | Ce dispositif immersif hybride combine immersion visuelle et retour d'efforts. Il est constitué d'un mur immersif de 3m x 2.25m avec affichage en stéroscopie active et capture des mouvements de l'utilisateur, combiné à un périphérique à retour d'efforts de grande taille (robot à câbles Inca de la société Haption). | ||
| − | + | Outre l'immersion visuelle, il permet donc à son utilisateur de percevoir un retour haptique complet (forces et couples) et offre un volume de manipulation important (de l'ordre d'un mètre-cube). | |
| − | + | Ce dispositif de réalité virtuelle immersive a été installé début 2011. Le robot haptique a été financé et installé en collaboration avec l'équipe [http://lsiit-cnrs.unistra.fr/avr-fr/index.php/Accueil|Automatique, Vision et Robotique] du LSIIT. | |
| − | |||
| − | == | + | == Périphériques haptiques == |
| − | + | Des périphériques haptiques classiques à destination d'un usage sur bureau sont également disponibles. Il s'agit de périphériques Phantom de la société Sensable, à 6 et 3 degrés de libertés. | |
| − | + | <gallery> | |
| − | + | Image:PhantomPremium.png | |
| + | Image:PhantomOmni.png | ||
| + | Image:PhantomOmni2.png | ||
| + | </gallery> | ||
| + | == Logiciels & développements propres == | ||
| − | + | La majorité des programmes développés s'appuie sur la bibliothèque [http://code.google.com/p/vrjuggler/ VRJuggler] pour s'abstraire de la configuration matérielle exécutant le programme (de la distribution et de la synchronisation de l'application le cas échéant, ainsi que pour s'abstraire de la gestion de la plupart des périphériques). Les deux dispositifs (workbench et mur immersif) offrent l'accès aux systèmes d'exploitation GNU/Linux et Windows. A noter que toute application est à même d'exploiter les dispositifs de visualisation directement, sous réserve de gérer elle-même la stéréoscopie, la capture de mouvements, ainsi que les éventuels périphériques requis. | |
| − | + | Divers développements logiciels réalisés au sein de l'équipe IGG du LSIIT sont également mis à disposition afin de tirer partie des matériels de la plateforme. Organisés sous la forme de modules indépendants, chacun est destinés à offrir une fonctionnalité de haut niveau, comme une technique d'interaction issue des recherches menées sur l'interaction en environnement immersif, ou comme la communication avec un type de périphérique donné. On y trouve ainsi la VRLIB, une boîte à outils de contrôles utilisable en environnement immersif ou encore le menu C<sup>3</sup> qui offre un contrôle d'application en environnement immers. | |
| − | |||
| − | |||
<gallery> | <gallery> | ||
Image:WBVRLibGeneral.jpg|Modeleur employant la VRLib | Image:WBVRLibGeneral.jpg|Modeleur employant la VRLib | ||
| Ligne 73 : | Ligne 60 : | ||
| − | = Applications - Liens = | + | == Applications - Liens == |
| − | Ces plateformes sont principalement utilisées dans le cadre des [[ | + | Ces plateformes sont principalement utilisées dans le cadre des [[Visualisation et interactions#Interaction | recherches en interaction]] menées au sein de l'équipe IGG du LSIIT. |
Elles sont également mises à disposition des étudiants des différentes filières informatique proposées par l'université de Strasbourg, notamment aux étudiants du [http://master-informatique.unistra.fr/isi/isi-formation.php master "Informatique et Sciences de l'Image"]. | Elles sont également mises à disposition des étudiants des différentes filières informatique proposées par l'université de Strasbourg, notamment aux étudiants du [http://master-informatique.unistra.fr/isi/isi-formation.php master "Informatique et Sciences de l'Image"]. | ||
| Ligne 82 : | Ligne 69 : | ||
| − | = Contact = | + | == Contact == |
Pour toute information complémentaire, contacter [[Olivier Génevaux | O. Génevaux]]. | Pour toute information complémentaire, contacter [[Olivier Génevaux | O. Génevaux]]. | ||
[[en:Virtual_Reality]] | [[en:Virtual_Reality]] | ||
Version du 27 avril 2011 à 09:40
L'expérience virtuelle
La plateforme de réalité virtuelle IN VIRTUO l'expérience virtuelle offerte par le LSIIT s'appuie principalement sur la mise à disposition de ressources matérielles, sous la forme:
- d'un plan de travail virtuel immersif (workbench);
- d'un mur immersif augmenté d'un périphérique haptique de grande taille (robot à câble);
- de périphériques haptiques individuels pour stations de travail.

Ces matériels sont complétés par la mise à disposition d'outils logiciels permettant d'en tirer le meilleur parti. En effet, outre les problématiques de développement des applications liées aux spécificités matérielles, tirer parti de ces environnements immersifs requiert une refonte complète de l'ergonomie des applications, et de l'interaction homme-machine. Pour combler le manque d'outils, de standards, et techniques existants, des développements logiciels issus des recherches de l'équipe IGG dans le domaine de l'interaction en environnement immersif sont égelement mis à disposition.
Workbench
Le workbench est un dispositif de réalité virtuelle immersive avec une configuration bien adaptée aux tâches de manipulation et d'interaction à distance humaine. La configuration mise à disposition offre deux écrans d'environ 2m de diagonale chacun avec un affichage en stéréoscopie active immerif grâce à lun système decapture des mouvements de l'utilisateur.
Ce dispositif de visualisation immersive est assorti de plusieurs périphériques (joystick ou manettes présentant un ensemble de boutons, deux gants de données, capables de mesurer la flexions des doigts de l'utilisateur, ainsi que le contact). Un robot à câbles SPIDAR, capable de restituer une force à son utilisateur est également disponible sur cette configuration.
Initiallement installé et géré par le 'Centre d'Etude du Calcul Parallèle et de la Visualisation' de l'ULP en février 2002, le matériel disponible a largement évolué et se trouve aujourd'hui majoritairement opéré par l'équipe IGG du LSIIT. En effet, fin 2007, le système de projection a été entièrement renouvellé grâce au financement du CPER IRMC thème Réalité Virtuelle. Son accès reste toujours libre à l'ensemble de la communauté des chercheurs de l'Université de Strasbourg.
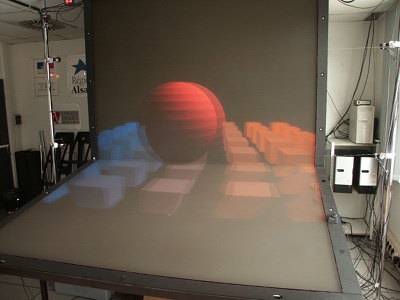
Mur immersif visuel & haptique
--- Illustrations ---
Ce dispositif immersif hybride combine immersion visuelle et retour d'efforts. Il est constitué d'un mur immersif de 3m x 2.25m avec affichage en stéroscopie active et capture des mouvements de l'utilisateur, combiné à un périphérique à retour d'efforts de grande taille (robot à câbles Inca de la société Haption).
Outre l'immersion visuelle, il permet donc à son utilisateur de percevoir un retour haptique complet (forces et couples) et offre un volume de manipulation important (de l'ordre d'un mètre-cube).
Ce dispositif de réalité virtuelle immersive a été installé début 2011. Le robot haptique a été financé et installé en collaboration avec l'équipe Vision et Robotique du LSIIT.
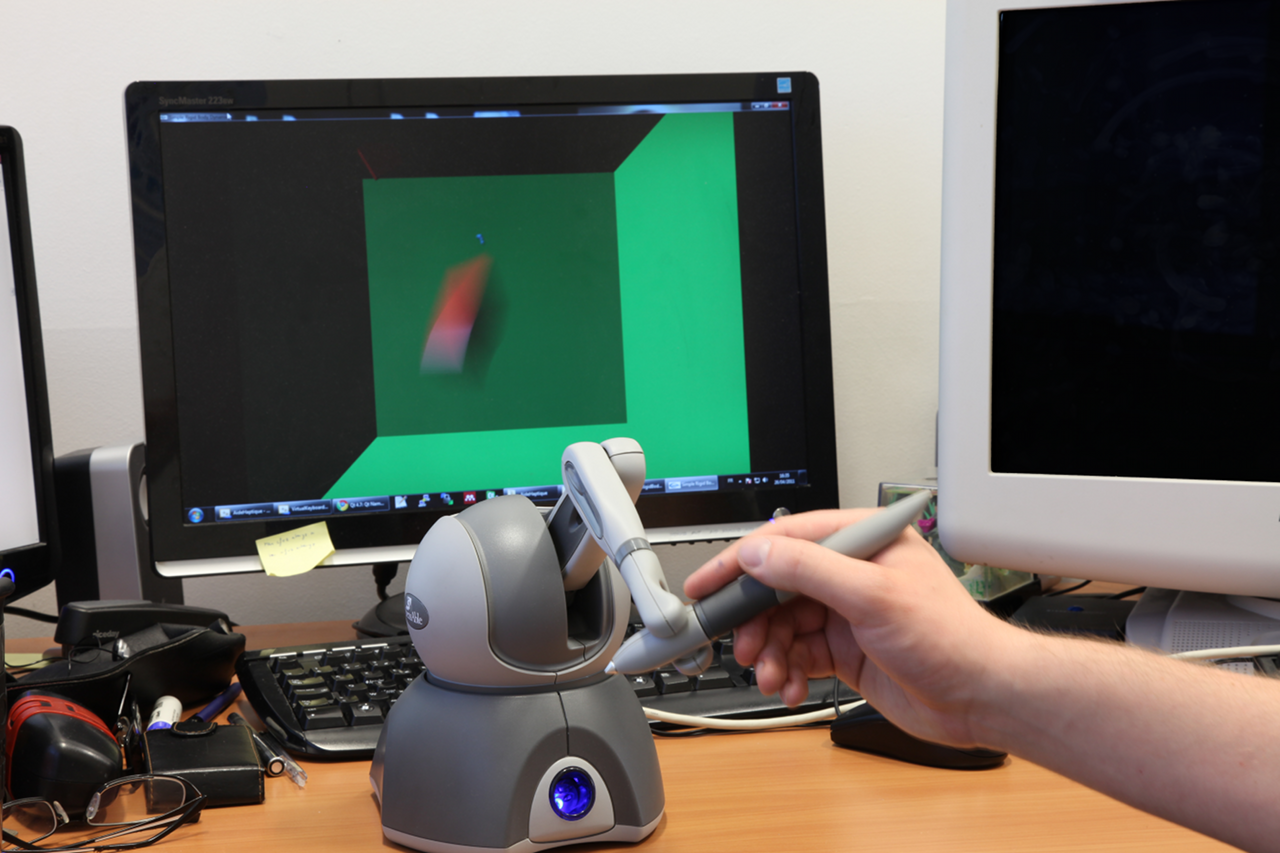
Périphériques haptiques
Des périphériques haptiques classiques à destination d'un usage sur bureau sont également disponibles. Il s'agit de périphériques Phantom de la société Sensable, à 6 et 3 degrés de libertés.


Logiciels & développements propres
La majorité des programmes développés s'appuie sur la bibliothèque VRJuggler pour s'abstraire de la configuration matérielle exécutant le programme (de la distribution et de la synchronisation de l'application le cas échéant, ainsi que pour s'abstraire de la gestion de la plupart des périphériques). Les deux dispositifs (workbench et mur immersif) offrent l'accès aux systèmes d'exploitation GNU/Linux et Windows. A noter que toute application est à même d'exploiter les dispositifs de visualisation directement, sous réserve de gérer elle-même la stéréoscopie, la capture de mouvements, ainsi que les éventuels périphériques requis.
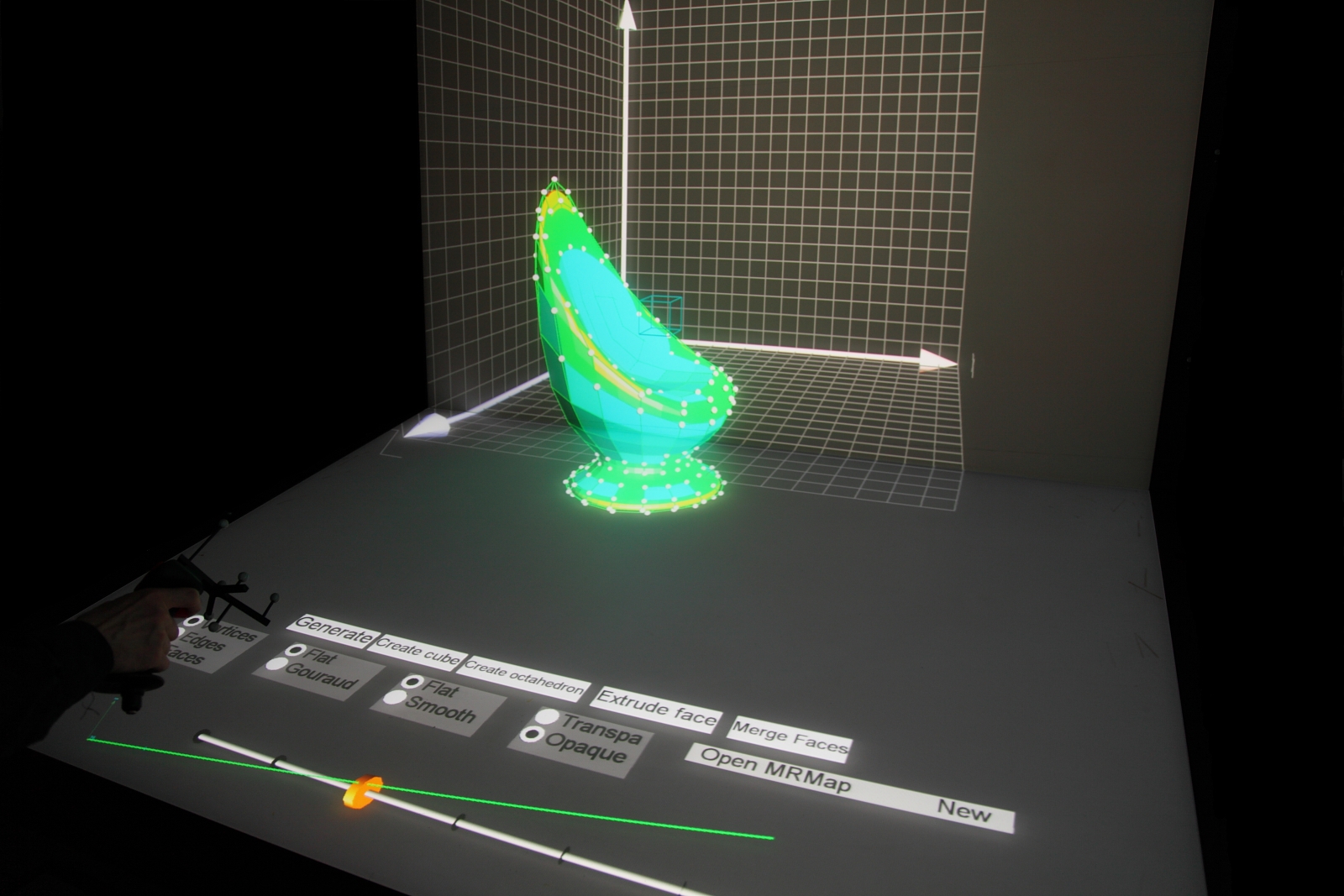
Divers développements logiciels réalisés au sein de l'équipe IGG du LSIIT sont également mis à disposition afin de tirer partie des matériels de la plateforme. Organisés sous la forme de modules indépendants, chacun est destinés à offrir une fonctionnalité de haut niveau, comme une technique d'interaction issue des recherches menées sur l'interaction en environnement immersif, ou comme la communication avec un type de périphérique donné. On y trouve ainsi la VRLIB, une boîte à outils de contrôles utilisable en environnement immersif ou encore le menu C3 qui offre un contrôle d'application en environnement immers.

Modeleur employant la VRLib

Exemple de contrôles offerts par la VRLIB

Applications - Liens
Ces plateformes sont principalement utilisées dans le cadre des recherches en interaction menées au sein de l'équipe IGG du LSIIT.
Elles sont également mises à disposition des étudiants des différentes filières informatique proposées par l'université de Strasbourg, notamment aux étudiants du master "Informatique et Sciences de l'Image".
Des contacts existent également avec la plateforme de réalité virtuelle mise en place par la région Alsace au sein de son pôle image Iconoval.
Contact
Pour toute information complémentaire, contacter O. Génevaux.