Modélisation et acquisitions
des objets (forme, apparence et mouvement)
Bilan
Ce thème fédère les activités de recherche de l'équipe autour de la création, de la représentation, et du traitement de modèles 3D complexes où deux défis scientifiques majeurs sont visés :
- faciliter la création d'objets 3D acquis par numérisation,
- produire des modèles d'objets efficaces au niveau de détail choisi,
La création de mondes virtuels 3D engendre des coûts de production qui ne cessent de croître en parallèle à la nécessité d’avoir recours à des équipes d’artistes producteurs de contenus toujours plus importantes. Des procédés technologiques de numérisation permettent de faciliter le travail de production de contenus dans certains cas, mais ils imposent souvent des contraintes très fortes et ne passent généralement pas à l’échelle.
Notre approche vise d'une part à développer des procédés permettant de faciliter la création d'objets 3D statiques ou dynamiques, avec ou sans information d'apparence. Ces travaux portent sur l'usage de technologies de numérisation (photographies, scanners 3D et capteur de mouvement) combinée à des traitements spécifiques.
Notre approche vise d'autre part à proposer et étudier de nouvelles structures combinatoires pour la représentation d'objets géométriques. Ces travaux englobent les variétés combinatoires et leurs extensions multirésolutions ; la modélisation de complexes cellulaires ou simpliciaux ; l'encodage de topologies discrètes ; et la description d'algorithmes exploitant ces structures topologiques pour la reconstruction et la détection de collisions.
L'ensemble de ces travaux est mis à la disposition de la communauté scientifique et industrielle via le développement de deux plate-formes : la plate-forme de modélisation géométrique CGoGN et la plate-forme de numérisation et modélisation 3D PNM 3D.
Participants permanents
- Deux professeurs : Dominique Bechmann et Jean-Michel Dischler
- Une chargée de recherche : Hyewon Seo
- Quatre maîtres de conférences : Rémi Allègre, David Cazier, Pierre Kraemer et Basile Sauvage
- Deux ingénieurs de recherche : Olivier Génevaux et Sylvain Thery
Autres participants
- 1 Collaborateur extérieur: Frédéric CORDIER (MC UHA Mulhouse, 09/2008-)
- 1 Ingénieur sur contrat: Cyril KERN (ANR VORTISS puis STREP PASSPORT 09/2007-05/2010)
- 4 Post-doctorants: Olivier GUILLOT (ATER, 09/2008-08/2009), Younis HIJAZI (STREP PASSPORT, 02/2009-12/2009), Thomas JUND (ATER, 10/2010-08/2011), Frédéric LARUE (Région Alsace, 12/2008-08/2009)
- 2 Doctorants: Lionel UNTEREINER (Ministère, 10/2010-), Kenneth VANHOEY (Ministère, 10/2010-)
- 6 Anciens doctorants: Dobrina BOLTCHEVA (Région Alsace-IRCAD, 10/2003-10/2007), Marc FOURNIER (Bourse du Canada, 10/2004-11/2008), Thomas JUND (Ministère, 10/2007-09/2010), Pierre KRAEMER (Ministère, 10/2005-11/2008), Frédéric LARUE (RIAM AMI3d, 10/2005-11/2008), Benjamin SCHWARZ (Contrat, 10/2004-08/2009).
Acquisition de modèles géométriques statiques et de leur apparence
Nous avons développé des procédés permettant d'automatiser et de simplifier la création de modèles numériques à partir de la réalité (scans et photographies).
Pour cela nous avons proposé d'une part un nouveau protocole de numérisation basé sur le principe de la projection de franges (lumière structurée). Ce protocole s’inscrit dans une chaîne complète de traitements que nous avons développée allant de l’acquisition à la visualisation. Dans le cadre de cette chaîne de traitements, nous avons proposé des solutions novatrices en matière de recalage, de débruitage, d’intégration et de visualisation des surfaces numérisées. Cette activité a permis la mise en place d’une plateforme technologique de numérisation au sein du laboratoire LSIIT (équipement + logiciel) et un transfert de technologie vers le CRITT HOLO3.
D'autre part, nous avons proposé des techniques permettant de faciliter la création et l'édition virtuelle de matériaux complexes, basés sur une représentation procédurale. L’objectif consiste à permettre à des créateurs de contenu 3D de reproduire plus facilement l’existant par des manipulations interactives simples, tout en garantissant une certaine liberté artistique à l’opposé des techniques de numérisation par scanners, qui, à l'inverse, ne permettent que de produire une copie numérique à l’identique.
Acquisition et modélisation du mouvement
Hyewon : à compléter
Modèles combinatoire multirésolutions
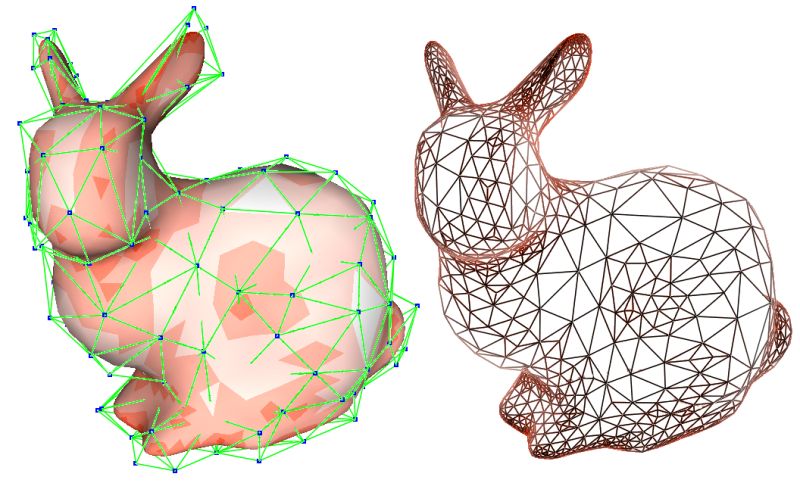
Une structure de données tout à fait originale, les cartes multi-résolution ou MR-maps, a été développée. Elle est basée sur les cartes combinatoires et en hérite la formalisation, la généralité et l'efficacité. Le modèle des MR-maps est également adaptatif c'est-à-dire qu'il permet un raffinement à une profondeur variable suivant les zones de l'objet modélisé. Suite à la définition des MR-maps, nous avons proposé un plongement de celles-ci sur des surfaces de subdivision KCB07, KCB07b.
Nous avons montré que le coût mémoire des MR-maps était similaire aux quadtrees dans le cas général, et adaptatif. Alors que l'efficacité des parcours des différents niveaux de résolution est grandement améliorée. Par exemple les opérations d’adjacence sont en temps constant pour les MR-maps, alors qu’elles sont plutôt en O(log(n)) pour les quadtrees (de hauteur n).
Ce nouveau type de plongement, jamais proposé pour des cartes combinatoires, possède de nombreux avantages. Les MR-maps supportent un large éventail de schémas de subdivision : les schémas primaux (découpant les faces) ou duaux (éclatement de sommets), et même des schémas plus originaux et non encore utilisés en multi-résolutions comme le schéma \sqrt(3) ou le schéma quad/triangle KCB07a (mélangeant facettes triangulaires et rectangulaires).
Détections des collisions
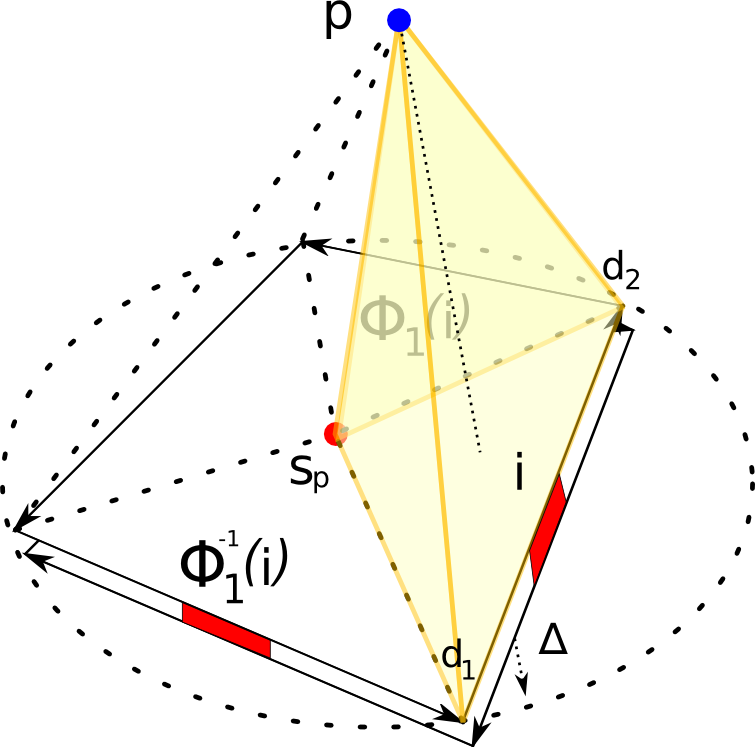
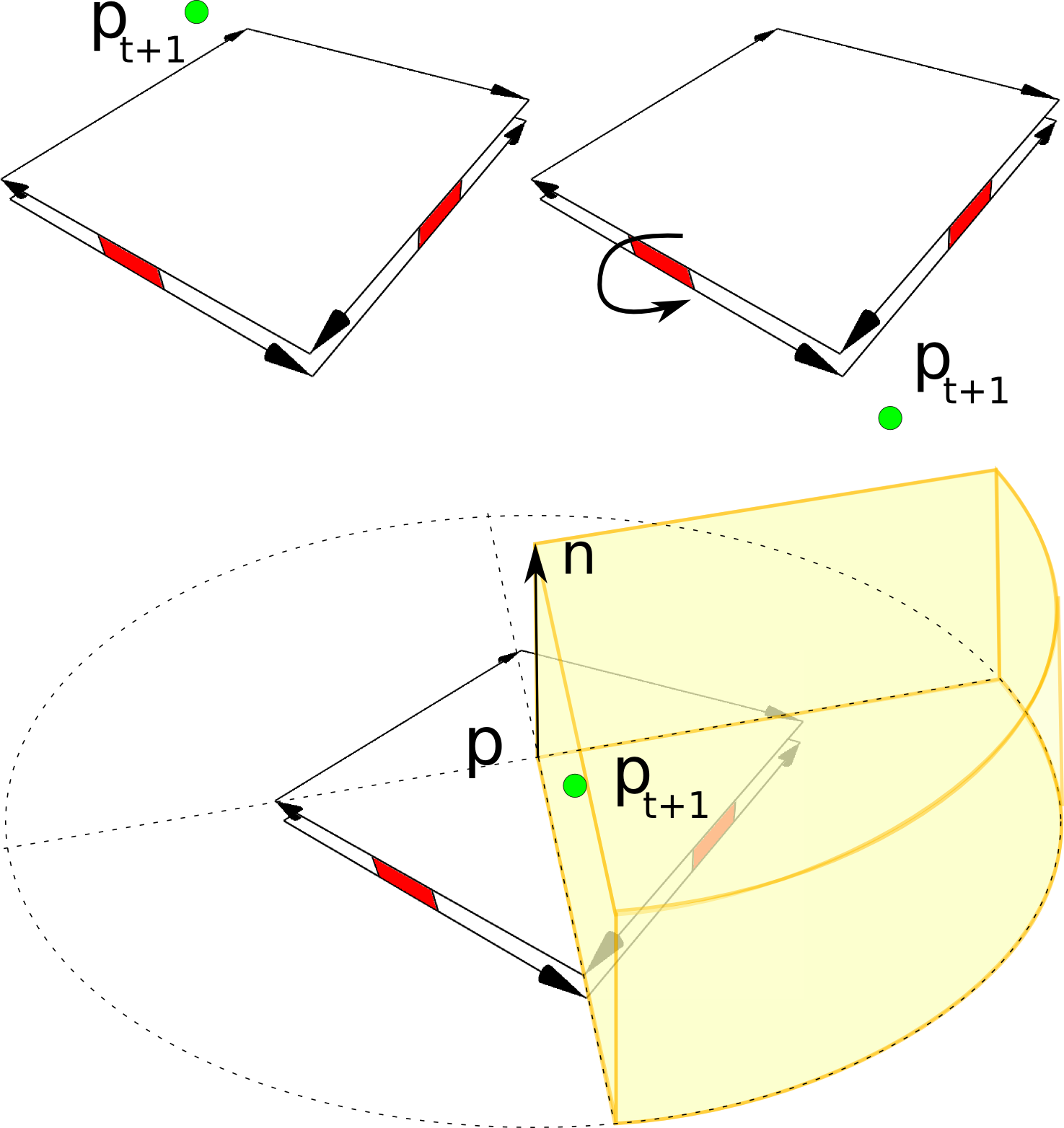
Nous avons proposé un mécanisme de suivi de la trajectoire de particules dans des volumes déformables. Celui-ci a été utilisé pour la détection de collision entre un mobile et son environnement, dans le cadre de simulations chirurgicales.


Applications médicales

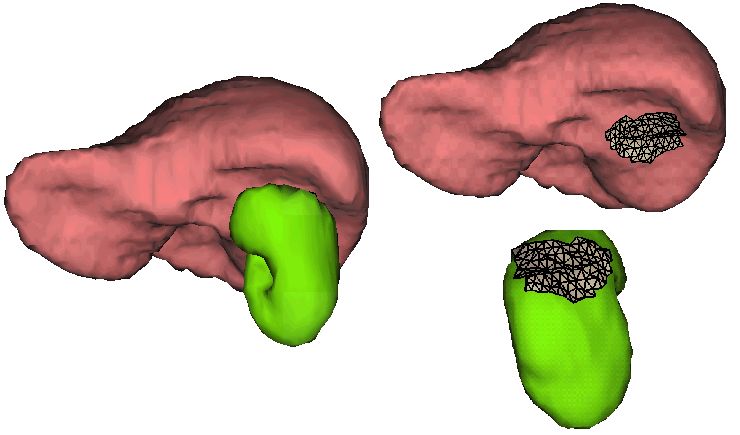
Dans le cadre de la reconstruction informatique des organes du corps humain à partir d'images provenant d'imageurs (scanner, IRM), nous nous sommes intéressés, en collaboration avec l'IRCAD, au passage d'images voxels segmentées vers des 2-variétés combinatoires.
Un algorithme innovant BBC09, basé sur une technique de Delaunay discrète a été conçu pour reconstruire un maillage qui reflète parfaitement la topologie des organes en terme d'adjacence (entre organes), d'inclusion (tumeurs) ou d'intersection (vaisseaux-organes).
Dans le cadre du projet européen PASSPORT, cet algorithme a été développé dans sa version multiorganes et intégrer aux logiciels de l'IRCAD.
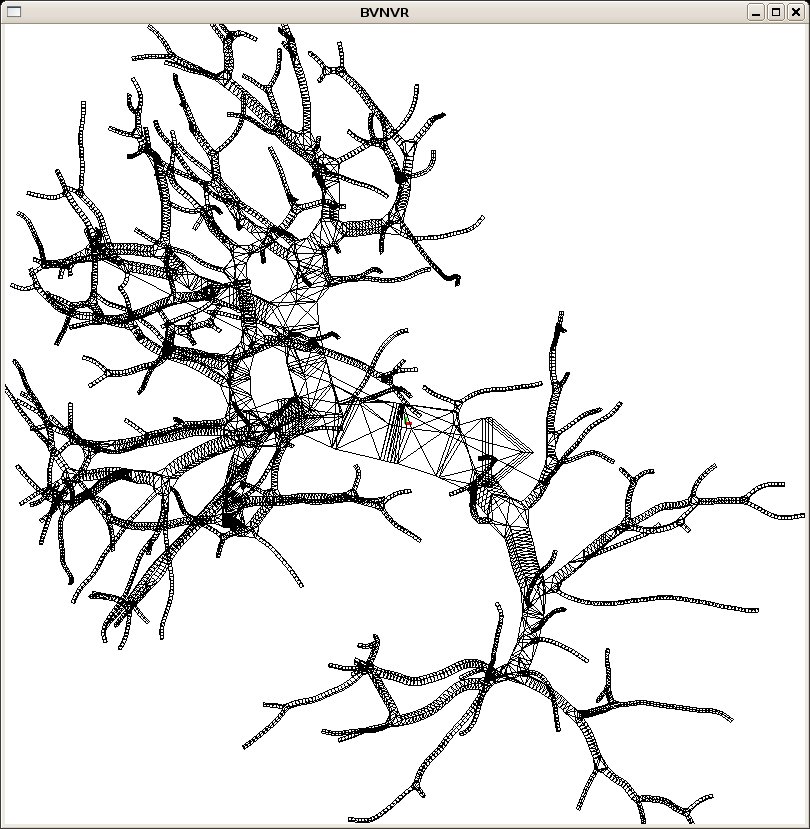
Dans le même contexte, nous avons défini un algorithme qui lève le verrou majeur de la reconstruction des embranchements multiples dans les arborescences (corps humain ou autre). Dans le corps humain, jusqu'à 7 embranchements peuvent se rejoindre. La reconstruction des vaisseaux sanguins du corps humain, en raison de leur géométrie posent d'autres difficultés que des organes homéomorphes à des sphères comme le foie.
Basé sur notre démarche de séparation de la topologie et de la forme, cet algorithme HBC10 utilise des techniques de géométrie algorithmique, en particulier l'enveloppe convexe, pour reconstruire simplement et automatiquement la topologie de tout type d'embranchements.
Perspectives
Modèles multirésolutions et multiéchelles
De nombreux travaux utilisent simultanément plusieurs représentations d’un même objet. Elles peuvent correspondre à différentes échelles de visualisation ou à différents niveaux de détails d’un même objet 3D, mais également à des modèles de natures différentes. Ainsi, en simulation, il n’est pas rare d’utiliser un maillage volumique grossier pour les calculs numériques, auquel un maillage surfacique plus fin est associé pour un rendu réaliste. Des représentations multiéchelles sont également utilisées pour la segmentation d’images, la compression ou le filtrage de maillages. Enfin de nombreux algorithmes font appel à des structures hiérarchiques pour accélérer les traitements, comme par exemple le lancer de rayon ou la détection de collisions.
Nous voulons proposer des structures combinatoires pour la représentation de tels objets multirésolutions et les équiper d'opérateurs topologiques multiéchelles permettant de gérer de manière cohérente et contrôlée les interdépendances entre représentations. Il s'agit par exemple de construire de telles hiérarchies, de les manipuler, d’y appliquer des découpes, des simplifications, des raffinements ou d’y faire des requêtes géométriques.
Modèles combinatoire multirésolutions
Nous continuerons nos travaux sur :
- Les cartes combinatoires et leurs extensions multirésolution
- Les surfaces de subdivisions et l'édition multirésolution
- Les maillages progressifs, leur encodage et leur visualisation
- Les maillages tétraédriques et leur représentation multiéchelles
- Les volumes de subdivisions et la discrétisation de données volumiques
- Le traitements de la géométrie : filtrage, compression, simplification
Segmentation d'images ou de maillages
Nous avons exploité la notion de diagrammes de Voronoï discrets, volumiques, contraints par des éléments de surfaces ou des courbes, pour la génération de maillages surfaciques et volumiques à partir d'images segmentées
Nous cherchons à étendre ces notions à des structures combinatoires volumiques pour permettre la segmentation de maillages et aborder sous un angle nouveau les problèmes liés à la simplification ou à l'échantillonnage de maillages volumiques.
Partition de l'espace et structure topologique
Nous avons proposé un mécanisme de suivi de la trajectoire de particules dans des volumes déformables. Celui-ci a été utilisé pour la détection de collision entre un mobile et son environnement, dans le cadre de simulations chirurgicales.
Nous voulons exploiter la structuration spatiale définie par nos modèles topologiques, pour aborder de manière plus général les problèmes de détection de collisions. Par exemple, nous étudions le suivi de maillages en déplacements dans d'autres maillages, les collisions entre de tels maillages, les auto-collisions, et la gestion des découpes et autres changements topologiques, pour la simulation temps réel.