Différences entre les versions de « GALERIE APERCU »
Aller à la navigation
Aller à la recherche




















































































































| (51 versions intermédiaires par 6 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | = Spécifications, Contraintes et Preuves en Géométrie = | ||
| + | <!-- | ||
| + | {{Image_Cadre|jfd_hmap1.png|left|230px}} | ||
| + | {{Image_Cadre|jfd_hmap1Torus.png|left|230px}} | ||
| + | {{Image_Cadre|jfd_hmap2.png|left|230px}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|jfd_polyhedra1.png|left|320px}} | ||
| + | {{Image_Cadre|jfd_nf.png|left|320px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | --> | ||
| + | == Formalisation et preuves de théorèmes en géométrie == | ||
| + | {{Image_Cadre_Text|Desargues.png|left|500px|Illustration du théorême de Desargues}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
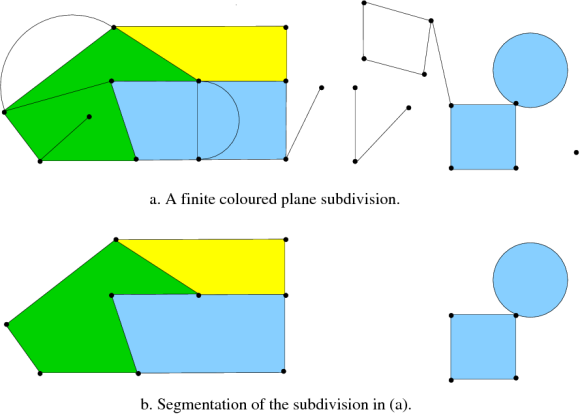
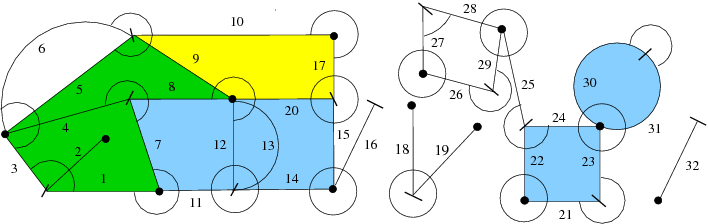
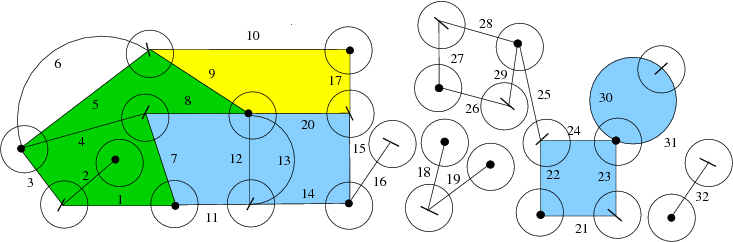
| + | ==Certification d'une opération de segmentation d'images 2D modélisées par des hypercartes colorées [[IMAGES_GALERIE#Certification d'une opération de segmentation d'images 2D modélisées par des hypercartes colorées| (Détail)]]== | ||
| + | {{Image_Cadre|jfd_seg_subd1seg.png|left|x150px}} | ||
| + | {{Image_Cadre|jfd_seg_hmap2.png|left|x150px}} | ||
| + | {{Image_Cadre|jfd_seg_hmap3.png|left|x150px}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|jfd_seg_hmap2seg.png|left|x150px}} | ||
| + | {{Image_Cadre|jfd_seg_hmap3seg.png|left|x150px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | == Spécification et résolution de contraintes géométriques == | ||
| + | {{Image_Cadre_Text|wernick108RC.png|left|x250px|Traduction géométrique d’une solution trouvée algébriquement}} | ||
| + | {{Image_Cadre_Text|W108Geo.png|left|x250px|Construction directe}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|Cg_moteur_anim.png|left|x150px}} | ||
| + | {{Image_Cadre|Cg_plan_tangent.jpg|left|x150px}} | ||
| + | {{Image_Cadre|Cg_lampe.jpg|left|x150px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | == Formalisation et planification d'opérations chirurgicales [[IMAGES_GALERIE#Planification d'opérations chirurgicales (Caroline Essert & Claire Baegert)| (Détail)]]== | ||
| + | {{Image_Cadre_Text|liver_deformation2.png|left|300|Inclusion de simulations biomécaniques dans la boucle d’optimisation [[http://icube-publis.unistra.fr/2-HPCE16 2-HPCE16]].}} | ||
| + | {{Image_Cadre_Text|SnapIPCAI3.png|left|302|Résolution de contraintes de positionnement en stimulation cérébrale profonde [[http://icube-publis.unistra.fr/2-EHLA12 2-EHLA12]].}} | ||
| + | {{Image_Cadre_Text|iceballs.png|left|213|Calcul de la propagation thermique en cryoablation [[http://icube-publis.unistra.fr/2-JE15 2-JE15]].}} | ||
| + | {{Image_Cadre_Text|pareto2.png|left|305|Points d'insertion possibles sur un front de Pareto [[http://icube-publis.unistra.fr/4-HVCJ16 4-HVCJ16]].}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|Caro_coloration_aiguille_sanspeau.jpg|left|x200px}} | ||
| + | <!--{{Image_Cadre|Caro_4_deforms.jpg|left|230px}}--> | ||
| + | {{Image_Cadre|Caro_zonesoptimisationdec2006_detoure.jpg|left|x200px}} | ||
| + | <!--{{Image_Cadre|Caro_2_sub.jpg|left|300px}}--> | ||
| + | {{Image_Cadre|Caro_4contraintes-inter.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Caro_fusionCsouples.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Caro_SCP.jpg|left|x200px}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|WbRadioFreq06.JPG|left|x200px}} | ||
| + | {{Image_Cadre|9N5A1811-small.jpg|left|x200px}} | ||
| + | {{Image_Cadre|9N5A1812-small.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Caro_phantom_small.jpg|left|x200px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | = Modélisation géométrique, Simulation et Interaction = | ||
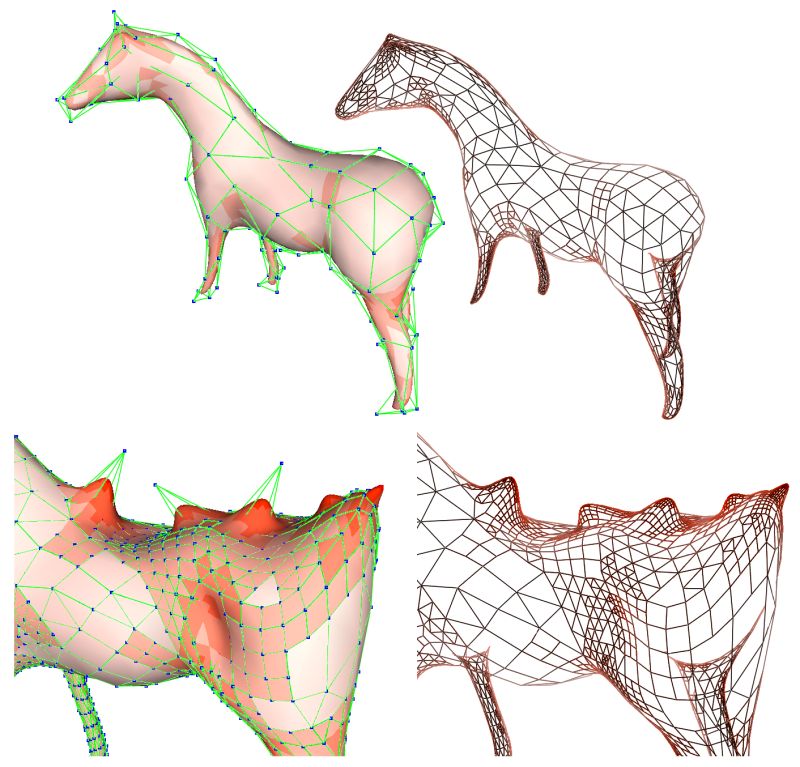
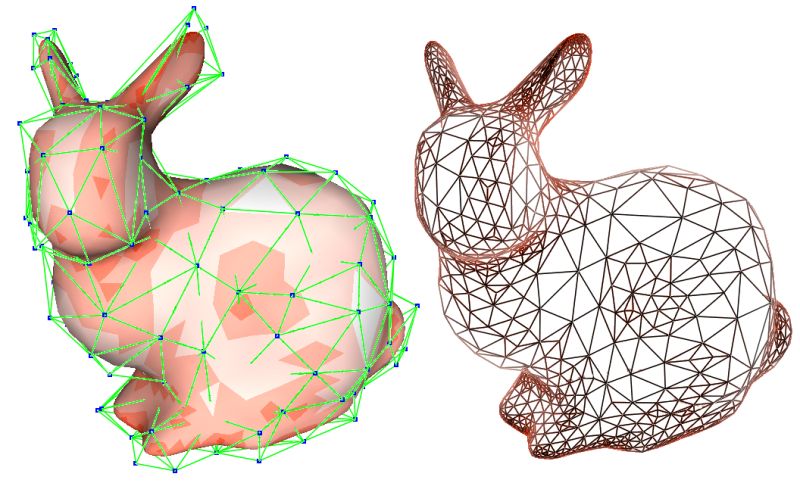
| + | == Modèle volumique adaptatif et multirésolution == | ||
| + | {{Image_Cadre_Text|volume_subdivision.png|left|x160px|Subdivision volumique d'un tore à trois trous modélisé par un ensemble de polyèdres quelconques.}} | ||
| + | {{Image_Cadre_Text|CPH_2D.png|right|220|Labellisation des cellules pour définir une hiérarchie implicite.}} | ||
| + | {{Image_Cadre_Text|pierre_cube_catmullclark.jpg|left|x200px|}} | ||
| + | {{Image_Cadre_Text|pierre_horse_quadtriangle.jpg|left|x200px|}} | ||
| + | {{Image_Cadre_Text|pierre_bunny_sqrt3.jpg|left|x200px|}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| − | ==Reconstruction de maillages à partir d'images voxels (Dobrina Boltcheva)== | + | == Détection des collisions dans des scènes en mouvement == |
| + | {{Image_Cadre_Text|CASA2014_cercle.png|left|330|Simulation de foule - Agents évoluant au milieu de mobiles (rouges).}} | ||
| + | {{Image_Cadre_Text|openStreetMapImport.png|left|220|Simulation de foule - Données géographiques importées depuis OpenStreetMap}} | ||
| + | {{Image_Cadre_Text|crowdOnFloor.png|left|212|Simulation de foule - Bâtiment composés d'étages superposés}} | ||
| + | {{Image_Cadre_Text|CrowdOnPlanet.png|left|171|Simulation de foule - Planète virtuelle}} | ||
| + | {{Image_Cadre_Text|crowdOnKnoth.png|left|155|Simulation de foule - Support de topologies extrême!}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | |||
| + | ==Materiel de réalité virtuelle== | ||
| + | {{Image_Cadre_Text|SpidarWB.jpg|left|x160px|Spidar & workbench}} | ||
| + | {{Image_Cadre_Text|Materiel_workbench.jpg|left|x160px|Gants & wand}} | ||
| + | {{Image_Cadre_Text|incaHardware.JPG|left|x160px|INCA}} | ||
| + | {{Image_Cadre_Text|incaHandle.JPG|left|x160px|Effecteur du périphérique haptique}} | ||
| + | {{Image_Cadre_Text|incaTracking.JPG|left|x160px|Caméra pour suivi de position}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | |||
| + | == Simulation de découpes et déchirures en temps réel == | ||
| + | {{Image_Cadre_Text|ISMAR2015_teaser.png|left|800|Vue augmentée d'un objet élastique supportant de fortes déformations et des changements topologiques.}} | ||
| + | {{Image_Cadre_Text|Liver-AR-01.png|left|800|Vue augmentée d'une séquence opératoire en milieu médical.}} | ||
| + | {{Image_Cadre_Text|ARinOR.png|left|403|Vue augmentée d'une séquence opératoire en milieu médical.}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | |||
| + | == Séparation des degrés de liberté pour la manipulation d'objets == | ||
| + | {{Image_Cadre_Text|DLL_splitting.png|left|800|Etude de l'impact de la séparation des degrés de liberté pour l'interaction en environnement immersif.}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | <!-- == Aides à la sélection de cibles en environnement immersif == --> | ||
| + | |||
| + | == Facteurs de perception des distances en environnement virtuel == | ||
| + | {{Image_Cadre_Text|Principle.png|left|538|Le principe de la projection hybride et les différents paramètres utilisés pour le rendu de la scène..}} | ||
| + | {{Image_Cadre_Text|Projection_example_1.png|left|610|L'image de gauche représente une vue de scène projetée avec la projection perspective ordinaire. L'image de droite montre un exemple la même vue avec la projection hybride. Sur l'image de gauche l'utilisateur ne voit pas les pieds de la chaise devant lui.}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|Virtual_visit.png|left|800|Exemple de visite virtuelle : des positions différentes lors de la visite d'une maison meublée. Le chemin de navigation est représenté en fil d'Ariane en vert.}} | ||
| + | <BR clear="all"/> | ||
| + | <BR/> | ||
| + | |||
| + | |||
| + | = Apparence et Mouvement = | ||
| + | |||
| + | == Système de capture de mouvements == | ||
| + | {{Image_Cadre|9N5A1838-small.jpg|left|230px}} | ||
| + | {{Image_Cadre|9N5A1844-small.jpg|left|230px}} | ||
| + | {{Image_Cadre|9N5A1853-small.jpg|left|230px}} | ||
| + | {{Image_Cadre|9N5A1857-small.jpg|left|230px}} | ||
| + | {{Image_Cadre|9N5A1859-small.jpg|left|102px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | == Analyse des formes, recalage, et segmentation de données dynamiques == | ||
| + | {| | ||
| + | |valign="top"|[[Image:img_featurepoints.png|left|thumb|x250px|[2-MSC15] Illustration de l'extraction de | ||
| + | points caractéristiques détectés à l'aide de notre technique AniM-DoG sur différentes poses de maillages animés. | ||
| + | La couleur d'une sphère représente l'échelle temporelle (du bleu au rouge) des points caractéristiques, | ||
| + | tandis que son rayon indique l'échelle spatiale.]] | ||
| + | |valign="top"|[[Image:img_spatialmatching.png|left|thumb|x250px| Etant donné un couple de maillages | ||
| + | animés présentant des mouvements similaires sémantiquement, nous calculons un ensemble peu dense de | ||
| + | points caractéristiques sur chaque maillage, ainsi que les correspondances spatiales entre eux | ||
| + | de façon à ce que des points ayant des mouvements similaires soient mis en correspondance.]] | ||
| + | |} | ||
| + | <BR> | ||
| + | |||
| + | == Dispositifs de numérisation 3D + apparence == | ||
| + | {{Image_Cadre_Text|ScannerLumStruct.jpg|left|300px|Scanner courte portée à lumière structurée}} | ||
| + | {{Image_Cadre_Text|laser_leica.png|left|95px|Scanner laser<BR>moyenne portée<BR>à temps de vol}} | ||
| + | {{Image_Cadre_Text|PhotoHardware.jpg|left|270px|Matériel photographique}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | == Reconstruction 3D d'objets numérisés par des scanners [[IMAGES_GALERIE#Reconstruction d'objets numérisés par des scanners (Marc fournier)| (Détail) ]] == | ||
| + | {{Image_Cadre_Text|PipelineGeo.png|left|900|Chaîne de traîtement pour la reconstruction d'objets 3D à partir de données de numérisation}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|Fournier1.jpg|left|x200px|}} | ||
| + | {{Image_Cadre_Text|Fournier2.jpg|left|x200px|}} | ||
| + | {{Image_Cadre_Text|Fournier3.jpg|left|x200px|}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|NUM_Venus.png|left|x200px|}} | ||
| + | {{Image_Cadre_Text|aphro_render.png|left|x200px|}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | == Reconstruction de l'apparence d'objets numérisés == | ||
| + | {{Image_Cadre_Text|PipelineAppearance.png|left|640|Chaîne de traitement pour le texturage d'objets 3D numérisés à partir d'un ensemble de photographie}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|OND_Ourson.png|left|600|''Statue ours'', cathédrale de Strasbourg. De gauche à droite: photographie, vues du modèle 3D reconstruit après numérisation de la géométrie (35M de points), vues du modèle 3D texturé après numérisation de l'apparence (55 photographies).}} | ||
| + | {{Image_Cadre_Text|OND_Taureau.png|left|690|''Statue taureau'', cathédrale de Strasbourg. De gauche à droite: photographie, vues du modèle 3D reconstruit après numérisation de la géométrie (22M de points), vues du modèle 3D texturé après numérisation de l'apparence (28 photographies).}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|MISHA_Masks.png|left|620|Copies numériques de trois masques dogons. De gauche à droite: masque ''adone'' (antilope), masque ''kanaga'', masque d'un oiseau surmonté d'un ''dege''.}} | ||
| + | {{Image_Cadre_Text|MISHA_Hogon.png|left|387|Copie numérique d'une coupe de ''Hogon'' (tribu dogon). Assemblée à droite, puis chaque pièce présentée de manière distincte à gauche.}} | ||
| + | {{Image_Cadre_Text|MISHA_Dege.png|left|255|Copies numériques de deux statuettes féminines ''dege'' (tribu dogon).}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|Elephant2.png|left|502|Comparaison entre texture couleur et ''champ de lumière''. Les reflets apparents augmentent le réalisme et permettent de mieux appréhender la nature des matériaux.}} | ||
| + | {{Image_Cadre_Text|NUM_Dragon.png|left|293|''Dragon''. Géométrie: 18.2M triangles. Texture: champ de lumière.}} | ||
| + | {{Image_Cadre_Text|NUM_Mask1.png|left|194|''Mask1''. Géométrie: 7.7M triangles. Texture: champ de lumière.}} | ||
| + | {{Image_Cadre_Text|NUM_Mask2.png|left|193|''Mask2''. Géométrie: 8.7M triangles. Texture: couleur.}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|VSGLD13teaser.png|left|300|[2-VSGL13] Partant d'un ensemble de photos prises à main levée, une représentation virtuelle de l'apparence d'un objet est reconstruite. Cette apparence encode entre autres les effets spéculaires.}} | ||
| + | {{Image_Cadre_Text|VSKLD15teaser.png|left|245|[2-VSKL15] Des objets 3D virtuels avec leur apparence sont simplifiés : il s'agit de les alléger en minimisant la perte de qualité visuelle.}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | == Modélisation et synthèse de textures == | ||
| + | {{Image_Cadre_Text|VSLD13teaser.png|left|220|[2-VSLD13] Des textures sont synthétisées à la volée sur GPU, à partir d'échantillons d'exemples à plusieurs échelles.}} | ||
| + | {{Image_Cadre_Text|GSVDG14teaser.png|left|322|[2-GSVD14] Des textures sont synthétisées à la volée sur GPU, grâce à une analyse spectrale.}} | ||
| + | {{Image_Cadre_Text|LSADDR16_Labeling_results.png|left|273|[2-LSAD16] Des cartes de labels multi-échelles sont obtenues à l'aide de notre méthode d'analyse de textures. Une application possible est l'édition interactive de textures.}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre_Text|Sponge_teapot.png|left|x200px|Texture volumique}} | ||
| + | {{Image_Cadre_Text|TreeF4.png|left|x200px|MegaTexel texture}} | ||
| + | {{Image_Cadre_Text|SceneFinaleRendu.png|left|x200px|Scène}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | |||
| + | = Précédents travaux = | ||
| + | |||
| + | ==Visualisation== | ||
| + | {{Image_Cadre_Text|Head_our.png|left|x200px|Visualisation volumique}} | ||
| + | {{Image_Cadre_Text|Ctknee_our.png|left|x200px|Visualisation volumique}} | ||
| + | {{Image_Cadre_Text|Ambientocclusion.png|left|x200px|Ambient occlusion}} | ||
| + | <!-- | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | ==Visualisation volumique accélérée par GPU [[IMAGES_GALERIE#Visualisation volumique accéléré par GPU (Lucas Ammann)| (Détail) ]]== | ||
| + | {{Image_Cadre|lucas_volumiqueRefraction1.jpg|left|230px}} | ||
| + | {{Image_Cadre|lucas_scanHF_1.jpg|left|230px}} | ||
| + | {{Image_Cadre|lucas_scanHFmultipleBox_1.jpg|left|230px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | ==Visualisation== | ||
| + | {{Image_Cadre|Rendu_foie_texture.jpg|left|x150px}} | ||
| + | {{Image_Cadre|Rendu_textures_vb.jpg|left|230px}} | ||
| + | {{Image_Cadre|Rendu_bijou.jpg|left|230px}} --> | ||
| + | {{Image_Cadre_Text|Rendu_fluide.jpg|left|x200px|Simulation de fluide}} | ||
| + | {{Image_Cadre_Text|Glass.png|left|x200px|Rendu temps-réel d'objets réfringents}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
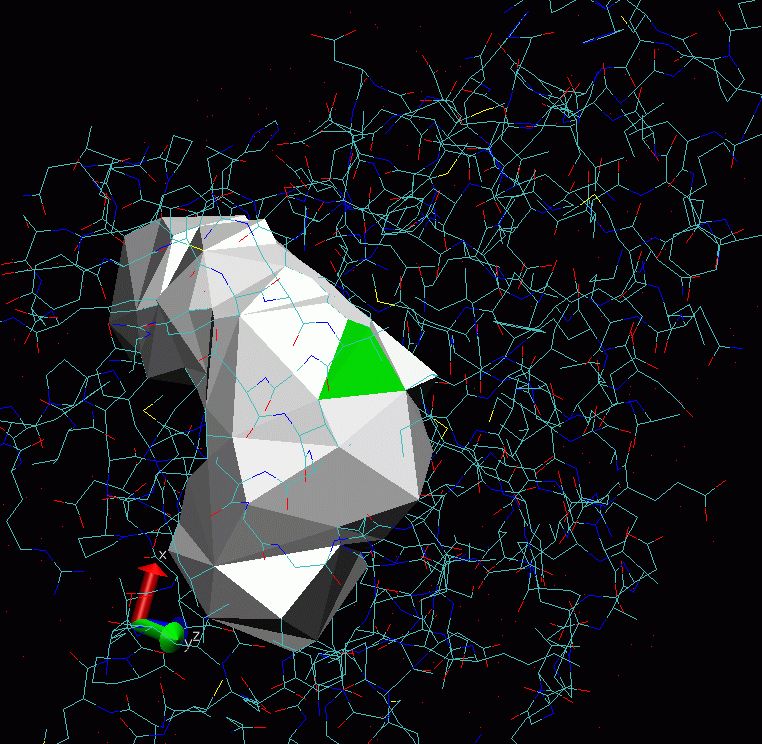
| + | ==Détection et caractérisation de poches dans les protéines [[IMAGES_GALERIE#Détection et caractérisation des poches dans les protéines (Benjamin Schwarz)| (Détail)]]== | ||
| + | {{Image_Cadre|Schwartz1.jpg|left|x250px}} | ||
| + | {{Image_Cadre|Schwartz3.jpg|left|x250px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
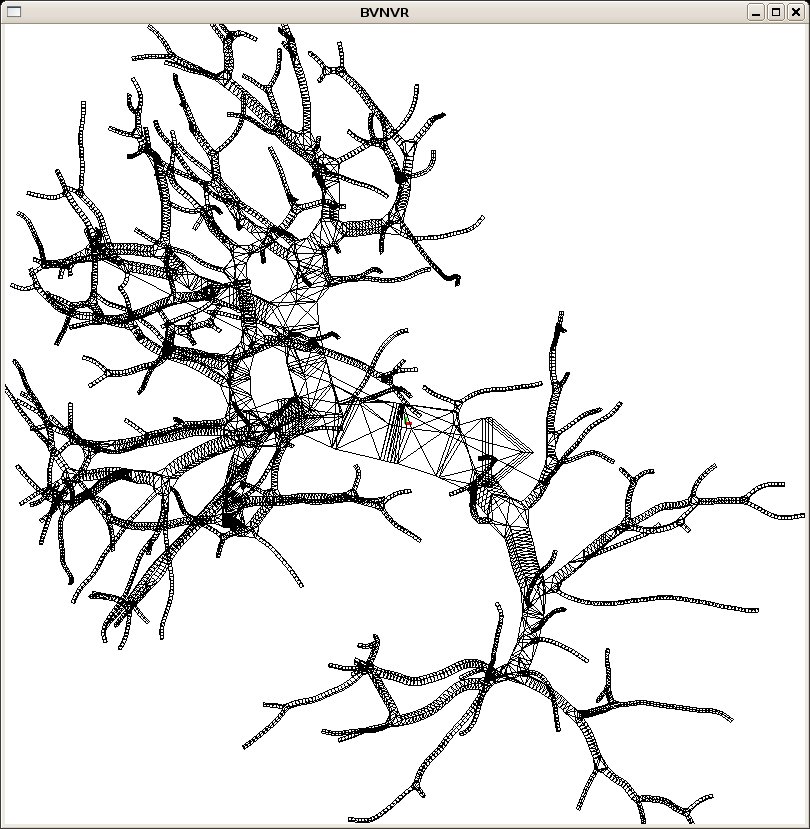
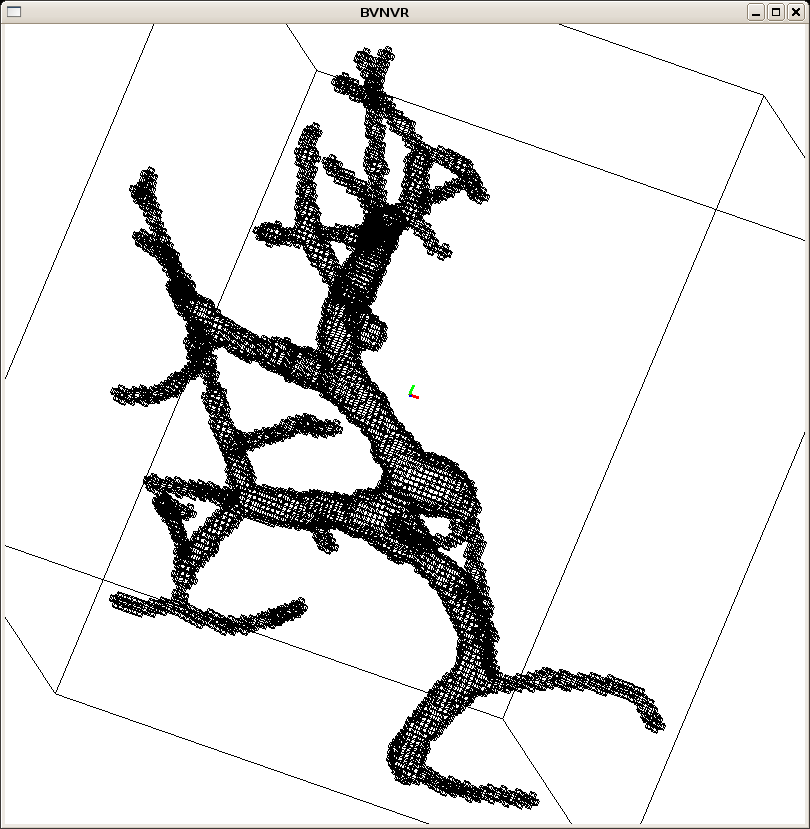
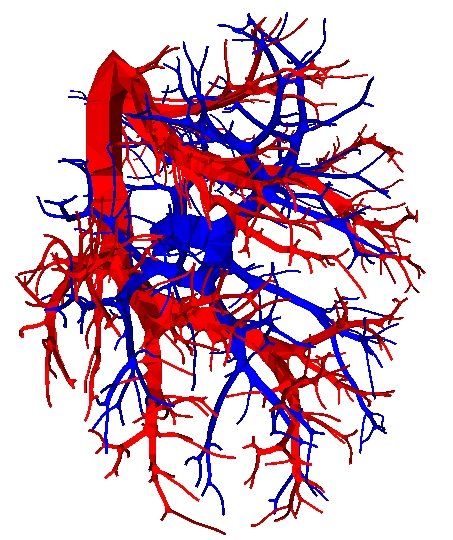
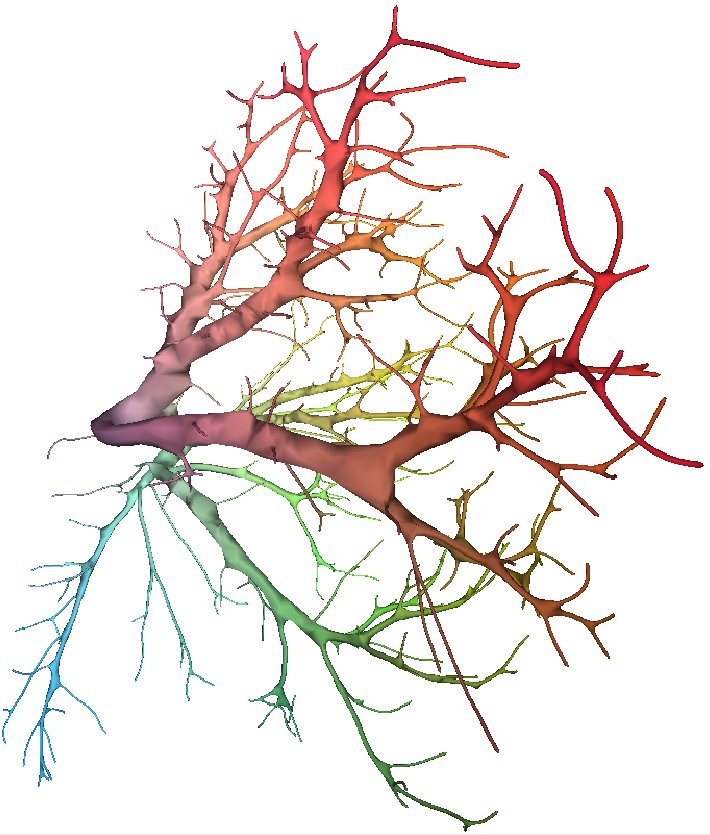
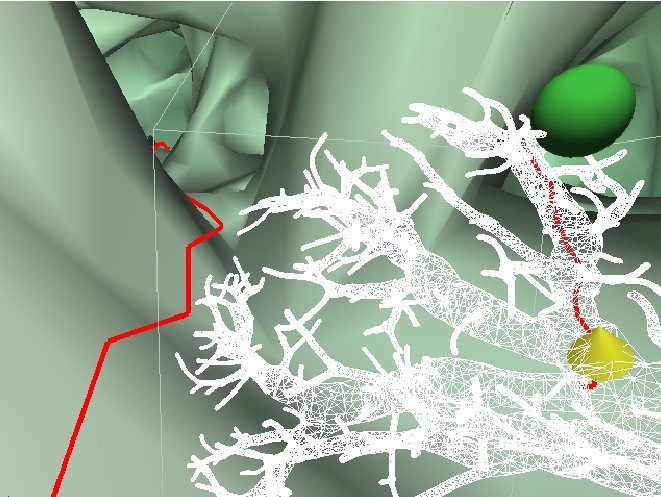
| + | ==Modélisation de vaisseaux sanguins pour la navigation== | ||
| + | {{Image_Cadre|Vaiss_2.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Vaiss_0.png|left|x200px}} | ||
| + | {{Image_Cadre|Vaiss_1.jpg|left|x200px}} | ||
| + | {{Image_Cadre|BV-Rainbow.jpg|left|x200px}} | ||
| + | {{Image_Cadre|FilArianne.jpg|left|x200px}} | ||
| + | <!-- <BR clear="all"/> | ||
| + | <BR> | ||
| + | {{Image_Cadre|Capture-NavigWIM.jpg|left|175px}} | ||
| + | {{Image_Cadre|Visu-In-Uni.jpg|left|175px}} --> | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
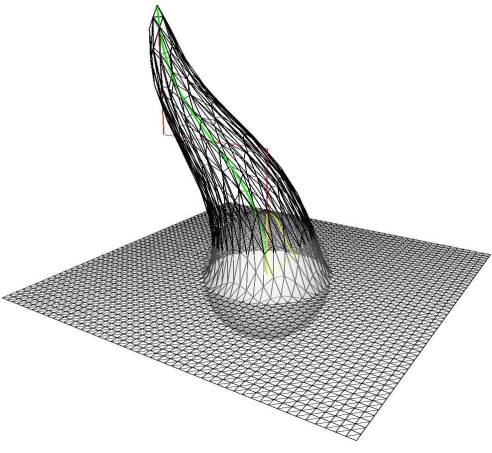
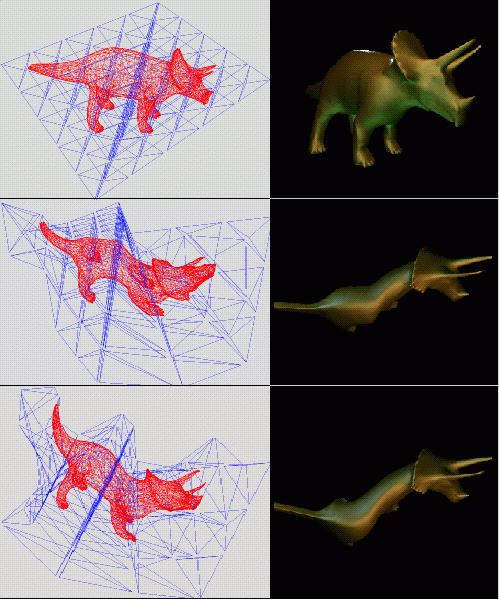
| + | ==Modèles de déformation== | ||
| + | {{Image_Cadre_Text|Dogme_corne.jpg|left|x200px|Dogme}} | ||
| + | {{Image_Cadre_Text|Dogmerv.jpg|left|x200px|Dogme en RV}} | ||
| + | {{Image_Cadre_Text|Dinosaure.png|left|x200px|CFFD}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | ==Reconstruction de maillages à partir d'images voxels [[IMAGES_GALERIE#Reconstruction de maillages à partir d'images voxels (Dobrina Boltcheva)| (Détail) ]]== | ||
| + | {{Image_Cadre_Text|dobrina_lapins.jpg|left|x150px|Lapin}} | ||
| + | {{Image_Cadre_Text|dobrina_dragons.jpg|left|x150px|Dragon}} | ||
| + | {{Image_Cadre_Text|dobrina_simultane.jpg|left|x150px|Reconstruction simultanée}} | ||
| + | {{Image_Cadre_Text|dobrina_bones-aorte.jpg|left|x150px|Aorte et squelette}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
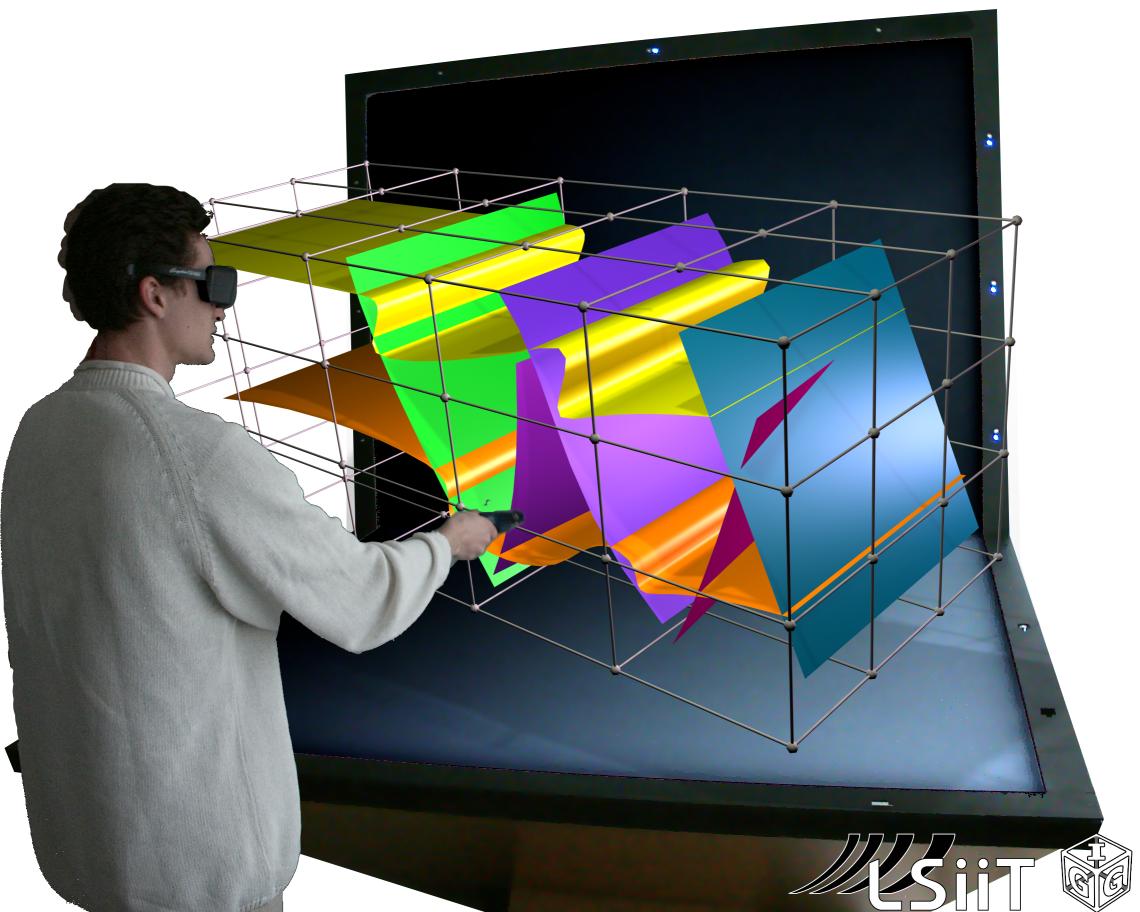
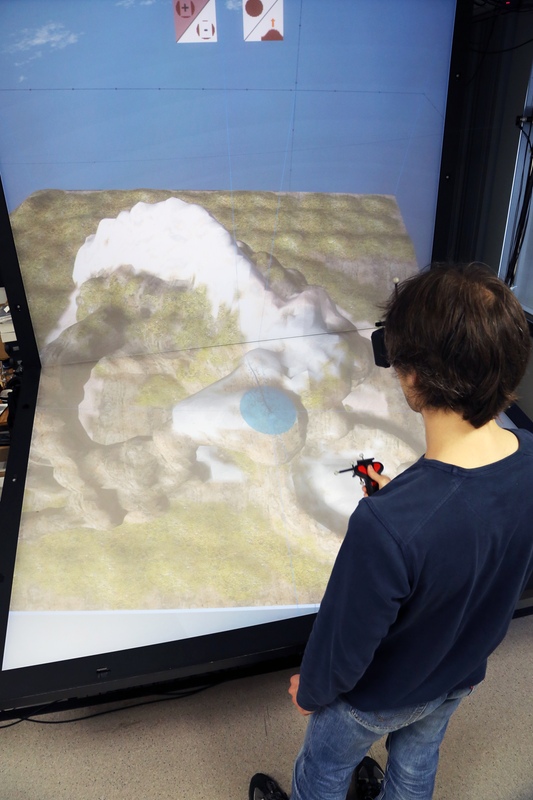
| + | ==Exploration de couches géologiques en environnement immersif== | ||
| + | {{Image_Cadre|Geolo_wb.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Geolo_pilote.jpg|left|x200px}} | ||
| + | {{Image_Cadre|Geolo_select.jpg|left|x200px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
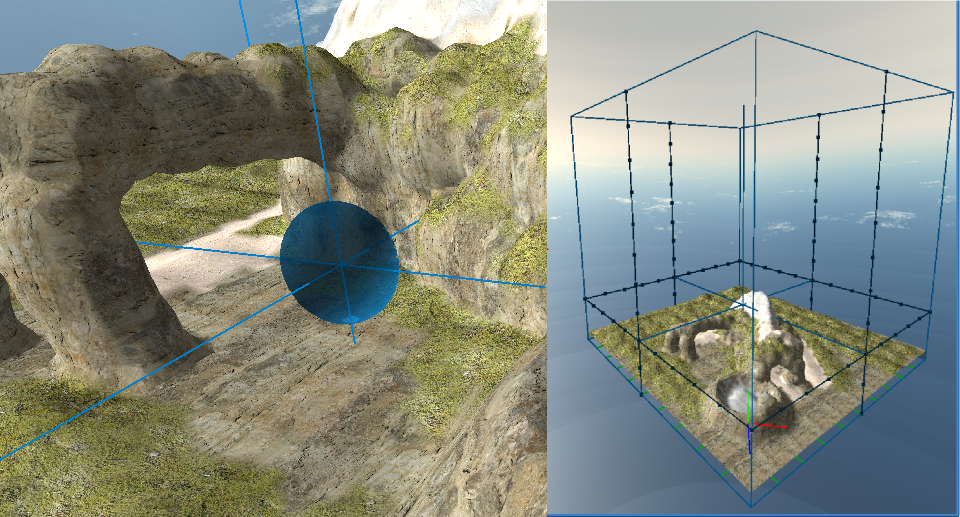
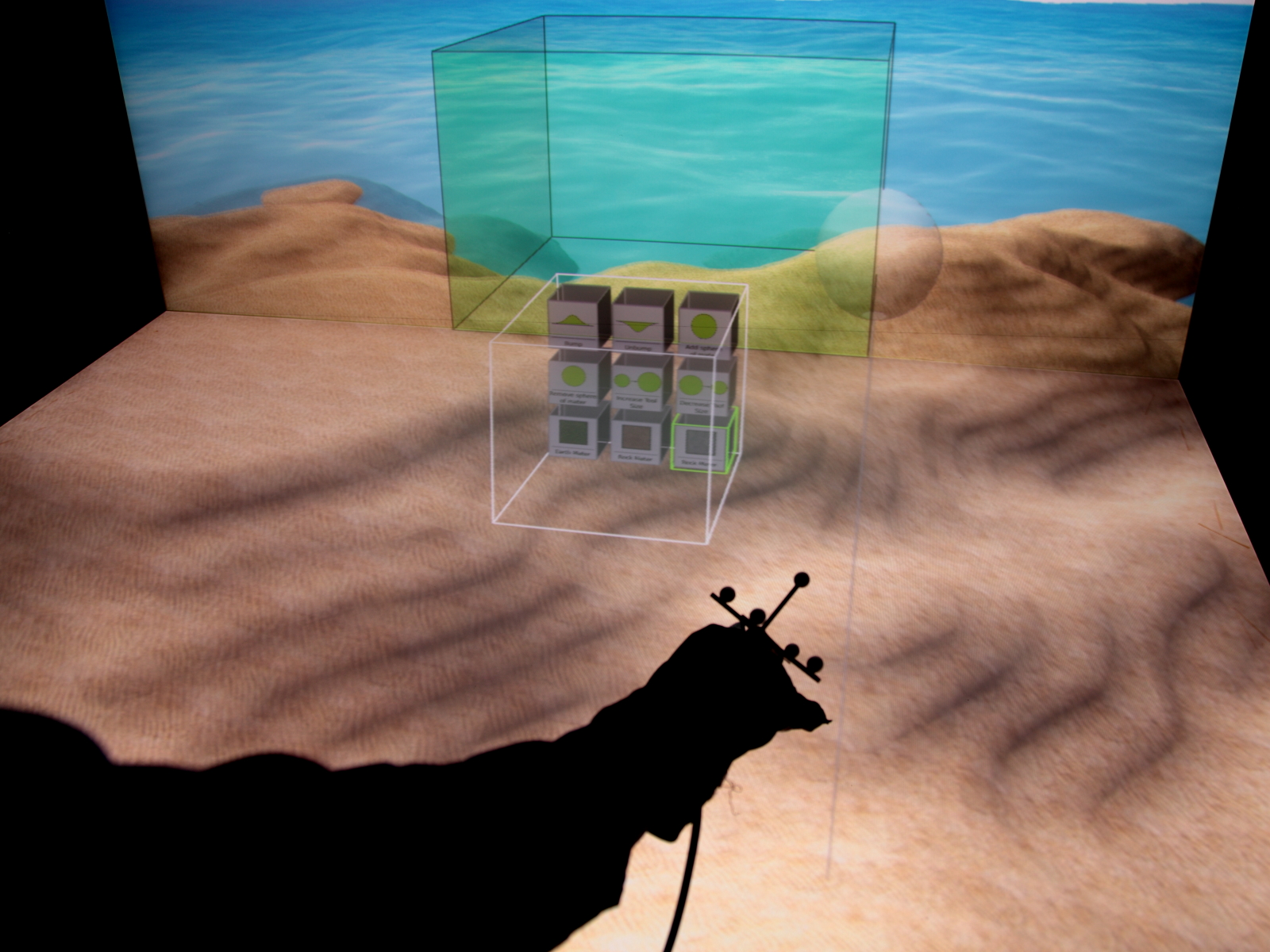
| + | ==Edition de terrain en environnement immersif== | ||
| + | {{Image_Cadre_Text|9N5A1819-small.jpg|left|x200px|Edition de terrain}} | ||
| + | {{Image_Cadre_Text|Rv_terrain.png|left|x200px|Edition de terrain}} | ||
| + | {{Image_Cadre_Text|CCubeTerrainEdit.jpg|left|x200px|CCube Menu}} | ||
| + | {{Image_Cadre_Text|9N5A1823-small.jpg|left|x200px|Edition de terrain}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
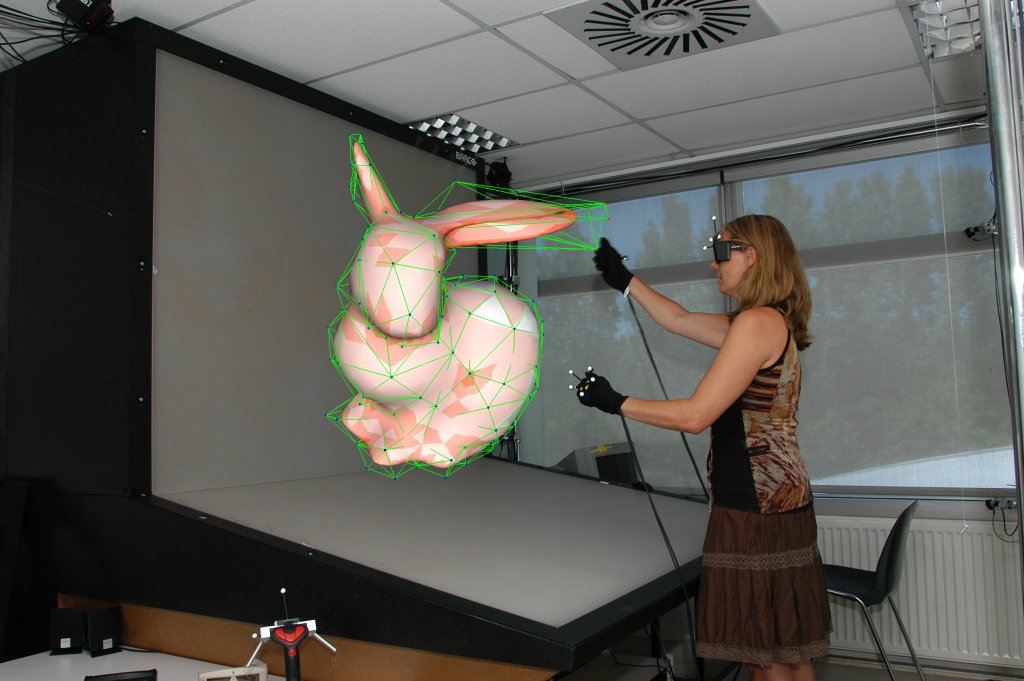
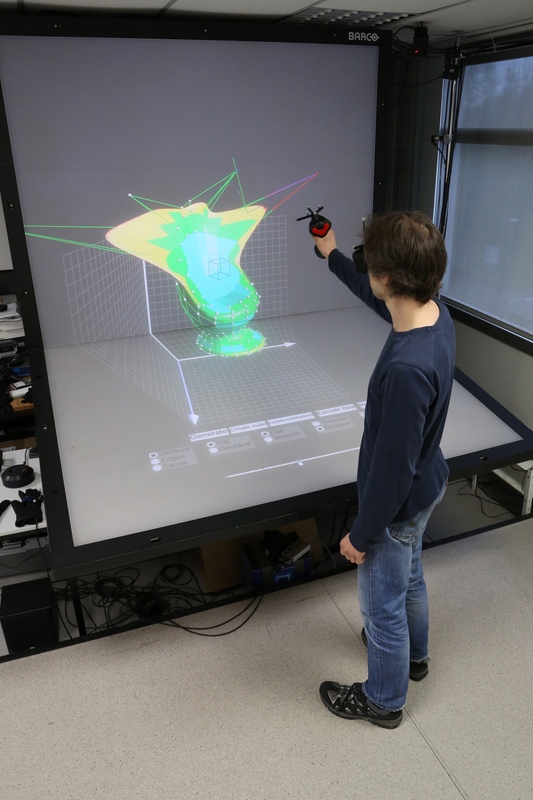
| + | ==Edition multi-resolution en environnement immersif== | ||
| + | {{Image_Cadre|wbMultiRes1.jpg|left|x150px}} | ||
| + | {{Image_Cadre|wbMultiRes2.jpg|left|x150px}} | ||
| + | {{Image_Cadre|wbMultiRes3.jpg|left|x150px}} | ||
| + | {{Image_Cadre|9N5A1800-small.jpg|left|x150px}} | ||
| + | {{Image_Cadre|9N5A1803-small.jpg|left|x150px}} | ||
| + | {{Image_Cadre|9N5A1805-small.jpg|left|x150px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
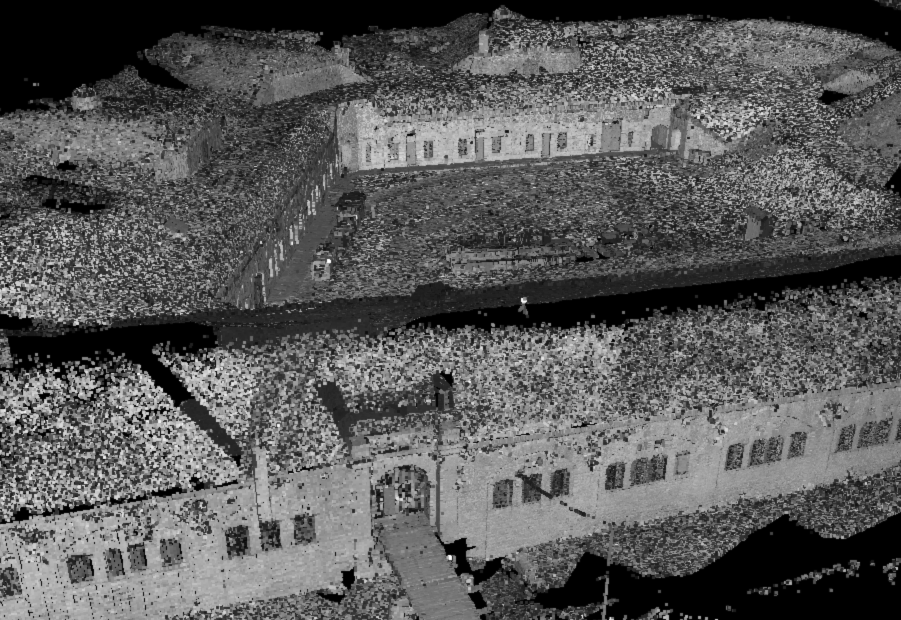
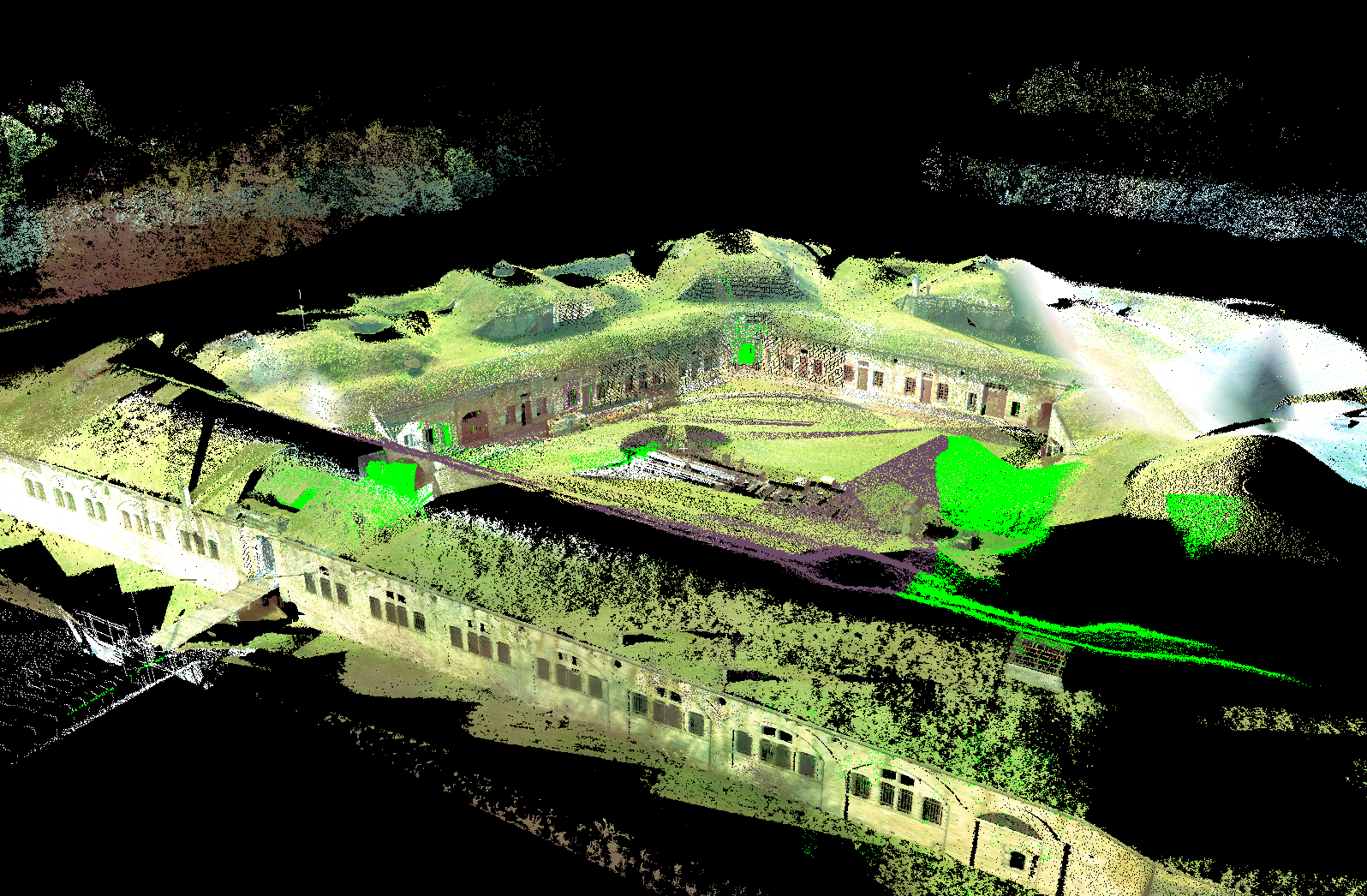
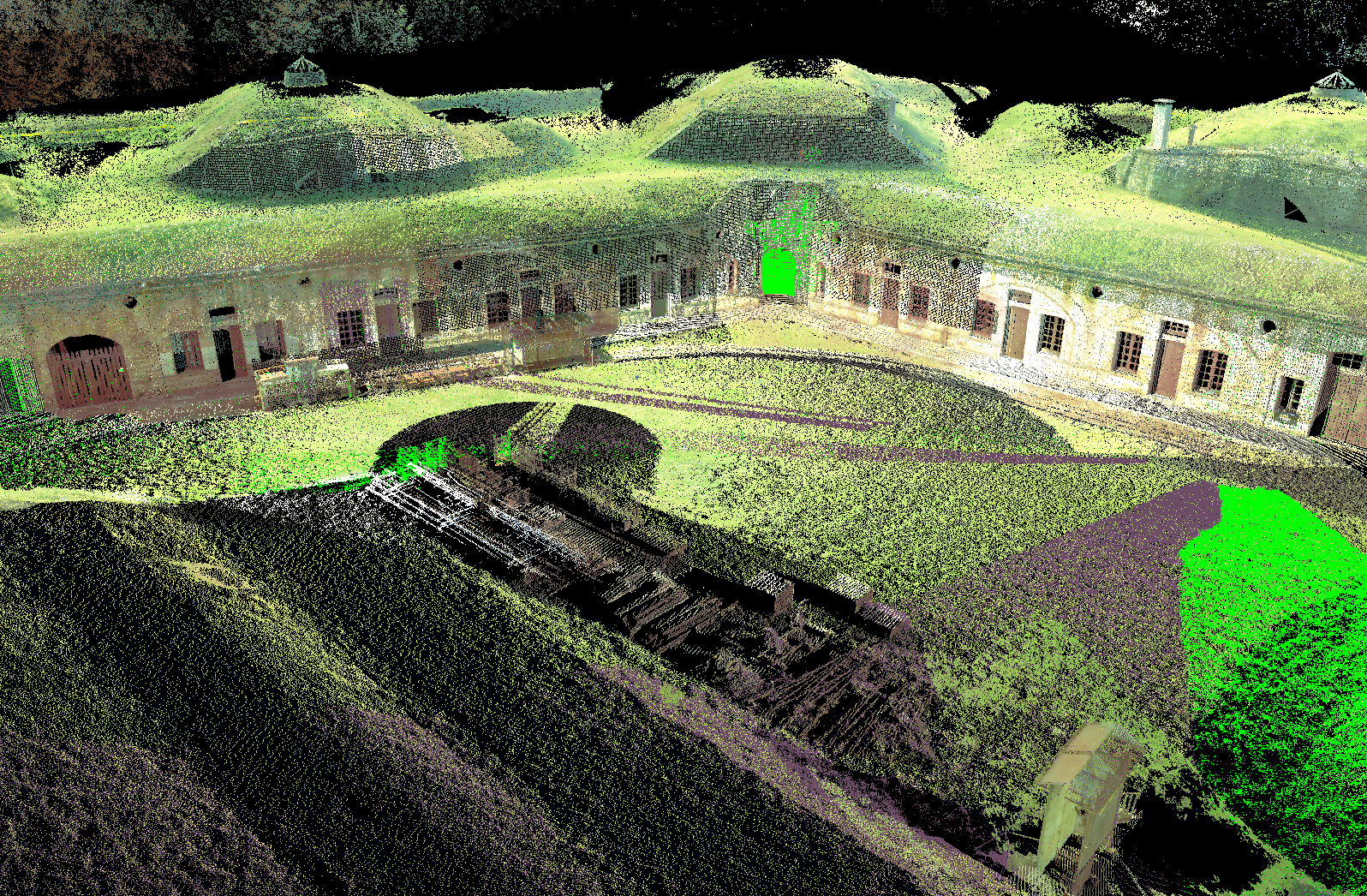
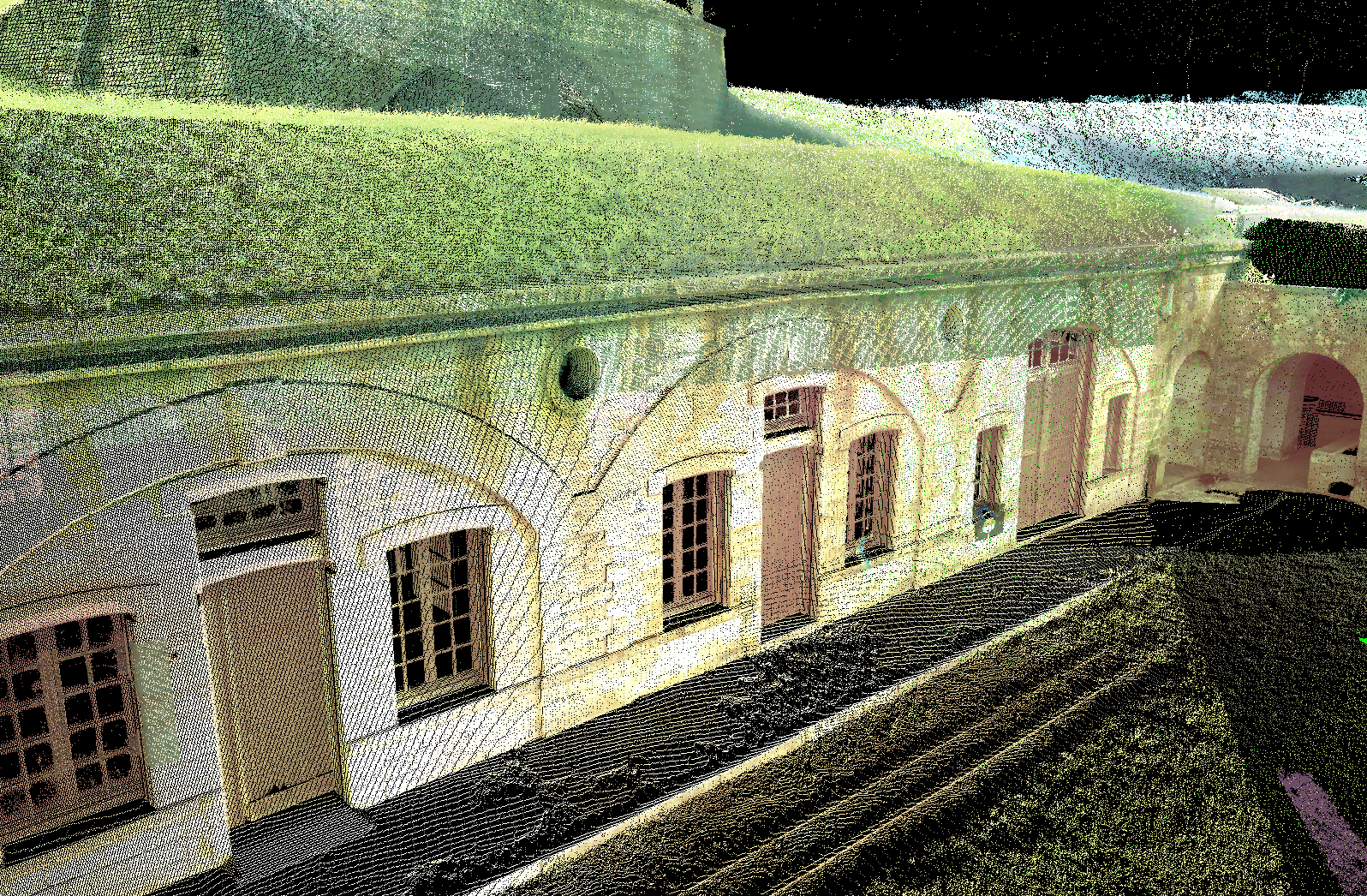
| + | == Numérisation d'un bâtiment avec [[ExRealis]] == | ||
| + | {{Image_Cadre|Fort.png|left|230px}} | ||
| + | {{Image_Cadre|FortBLAOverview1.png|left|230px}} | ||
| + | {{Image_Cadre|FortBLAOverview2.png|left|230px}} | ||
| + | <BR clear="all"/> | ||
| + | {{Image_Cadre|FortBLAOverview3.png|left|230px}} | ||
| + | {{Image_Cadre|FortBLACloseup1.png|left|230px}} | ||
| + | {{Image_Cadre|FortBLACloseup2.png|left|230px}} | ||
| + | <BR clear="all"/> | ||
| + | <BR> | ||
| + | |||
| + | [[en:Gallery]] | ||
Version actuelle datée du 26 janvier 2017 à 18:01
Spécifications, Contraintes et Preuves en Géométrie
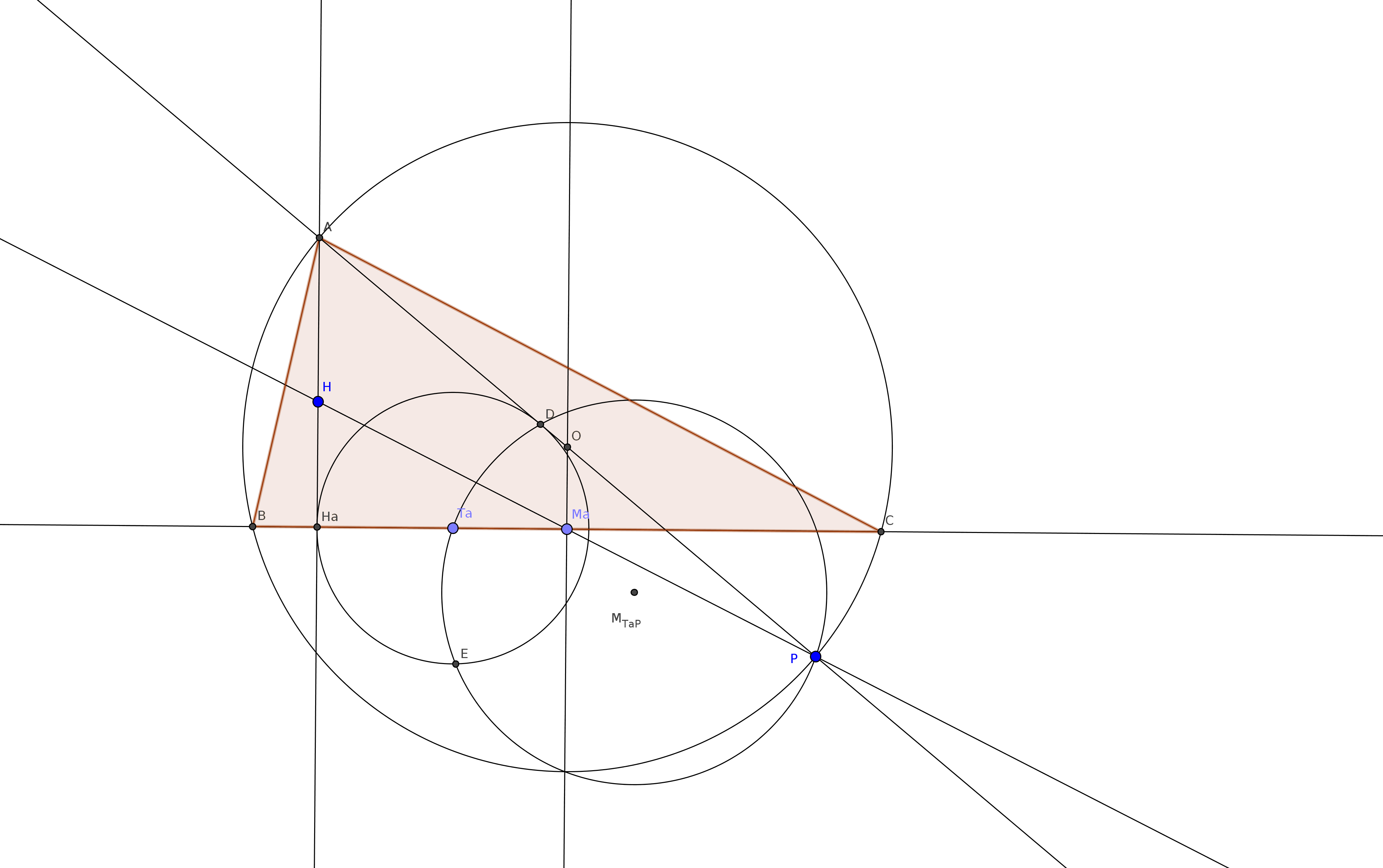
Formalisation et preuves de théorèmes en géométrie
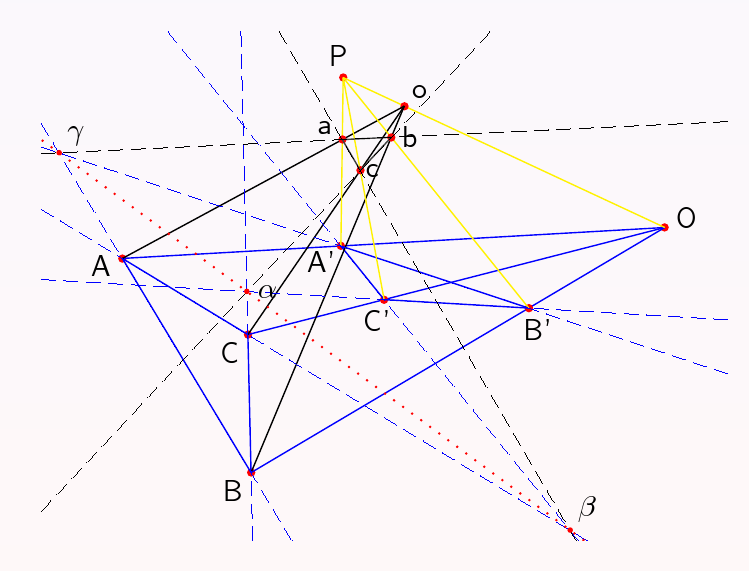
Illustration du théorême de Desargues
Certification d'une opération de segmentation d'images 2D modélisées par des hypercartes colorées (Détail)


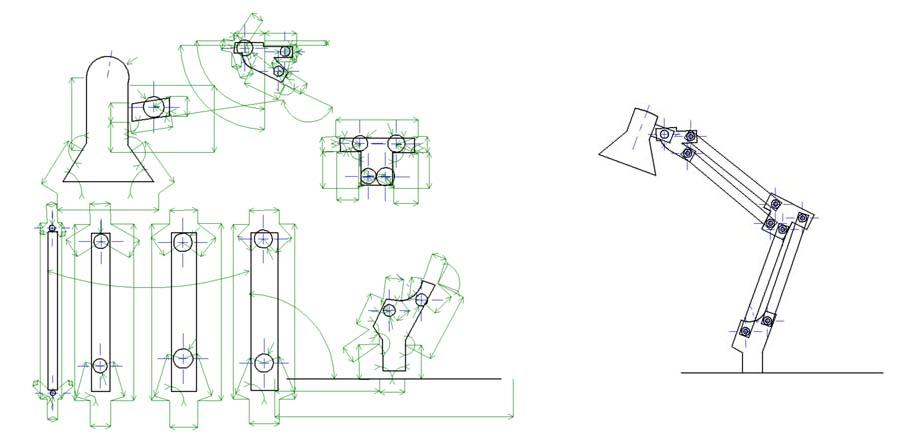
Spécification et résolution de contraintes géométriques

Traduction géométrique d’une solution trouvée algébriquement
Construction directe

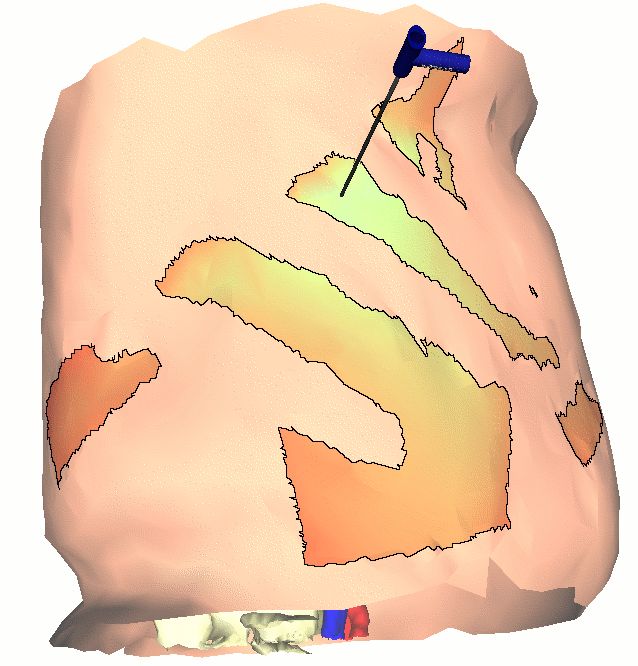
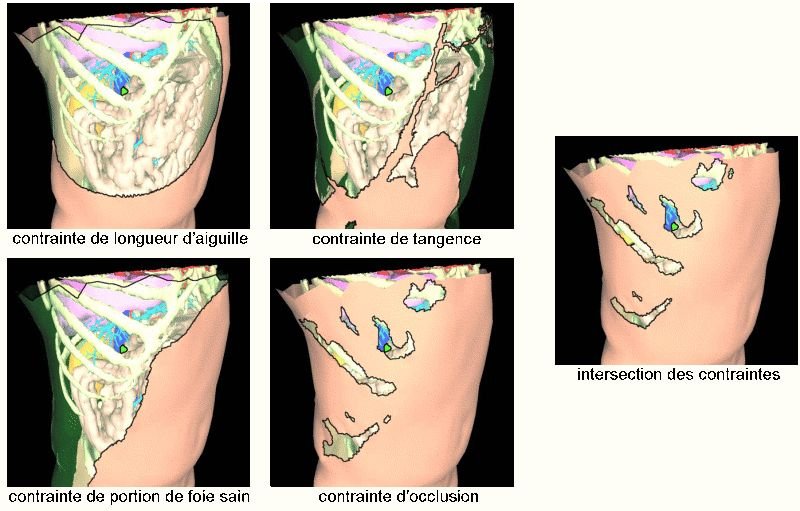
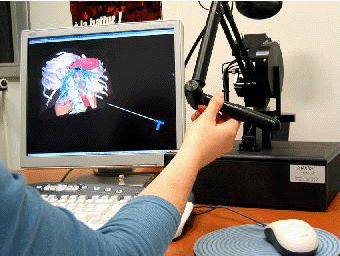
Formalisation et planification d'opérations chirurgicales (Détail)
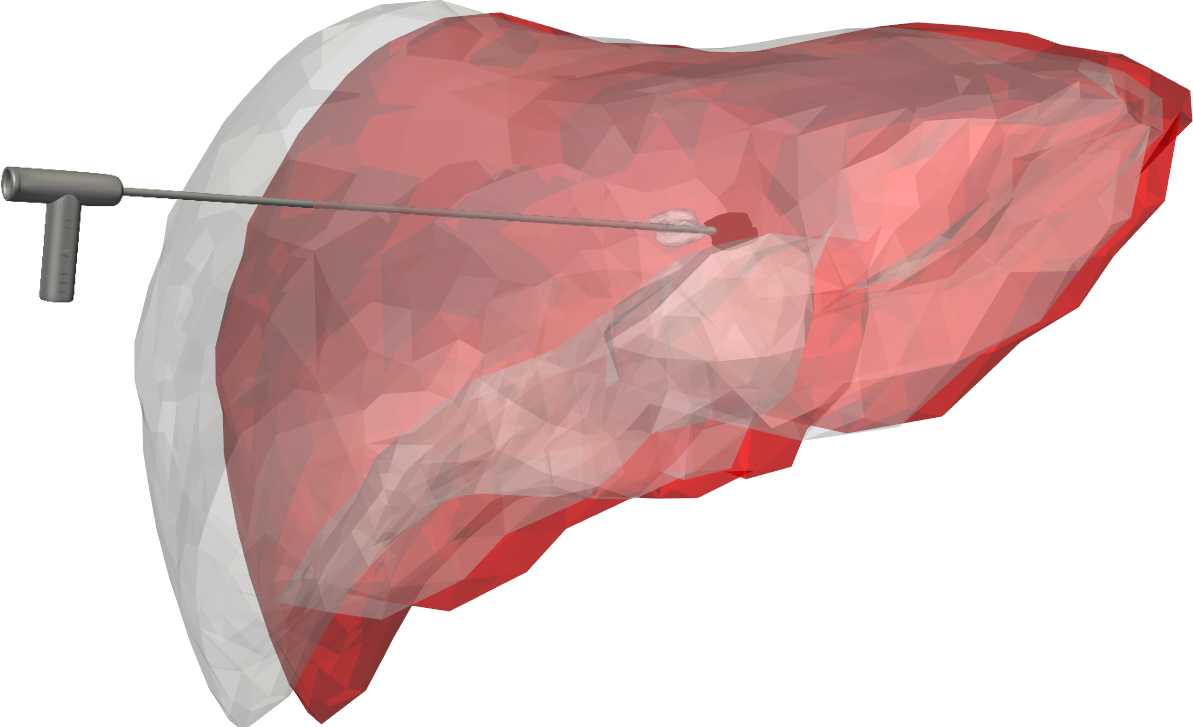
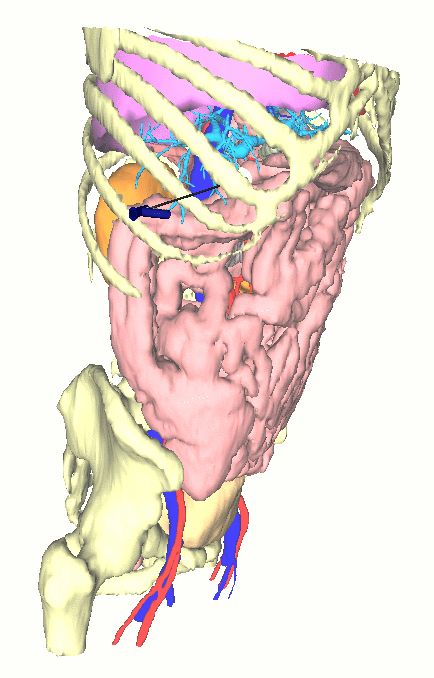
Inclusion de simulations biomécaniques dans la boucle d’optimisation [2-HPCE16].
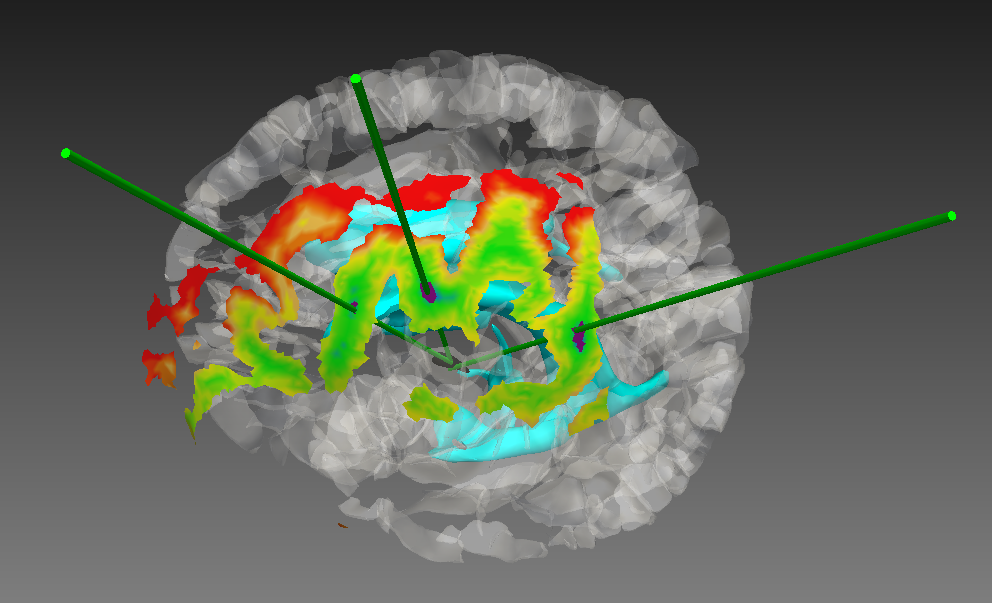
Résolution de contraintes de positionnement en stimulation cérébrale profonde [2-EHLA12].
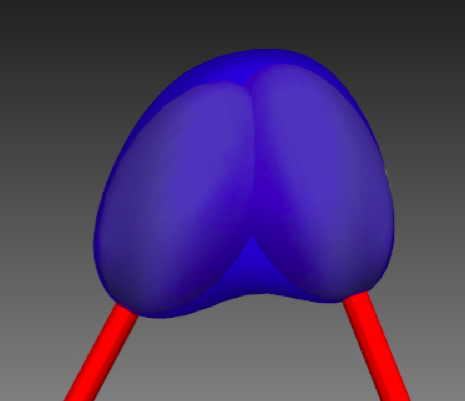
Calcul de la propagation thermique en cryoablation [2-JE15].
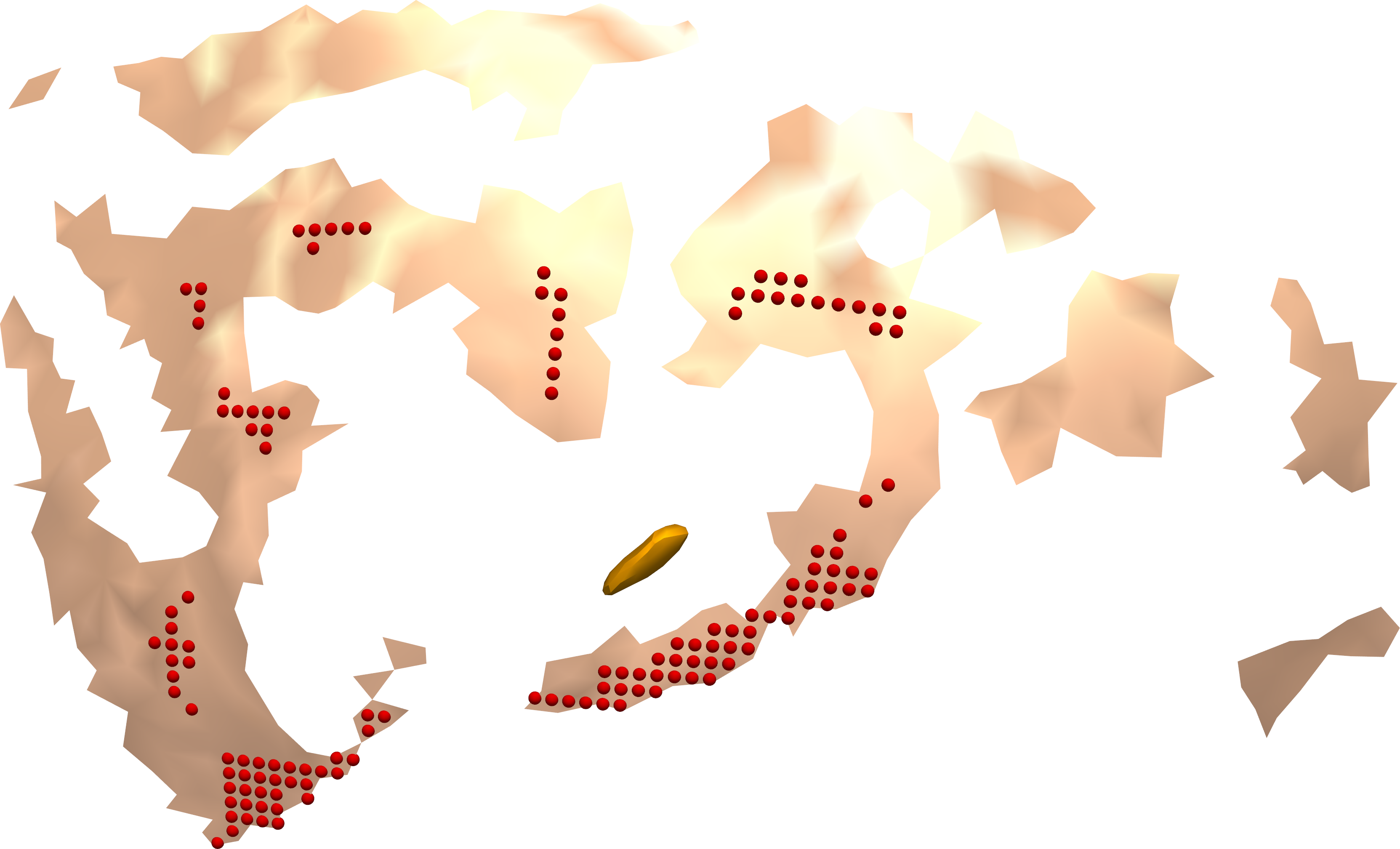
Points d'insertion possibles sur un front de Pareto [4-HVCJ16].




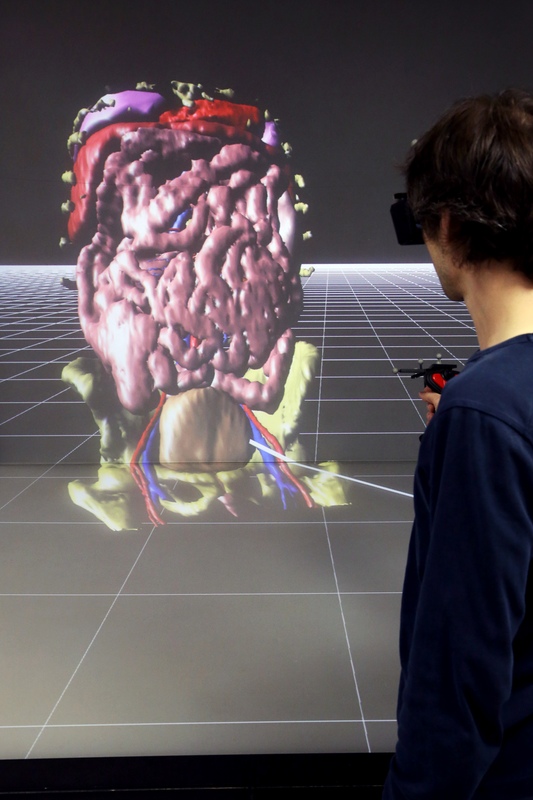
Modélisation géométrique, Simulation et Interaction
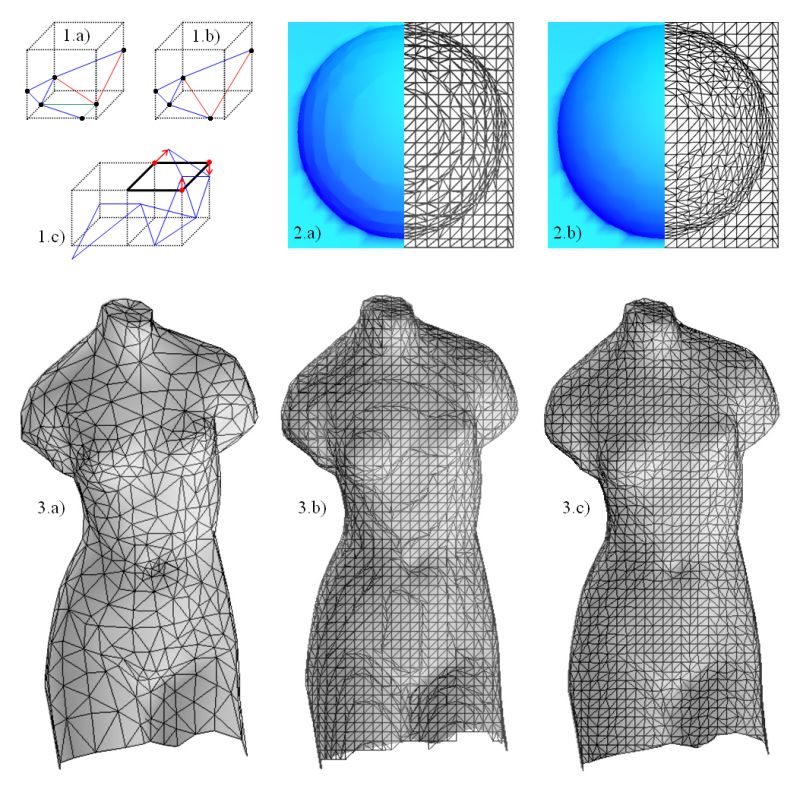
Modèle volumique adaptatif et multirésolution

Subdivision volumique d'un tore à trois trous modélisé par un ensemble de polyèdres quelconques.

Labellisation des cellules pour définir une hiérarchie implicite.

Détection des collisions dans des scènes en mouvement
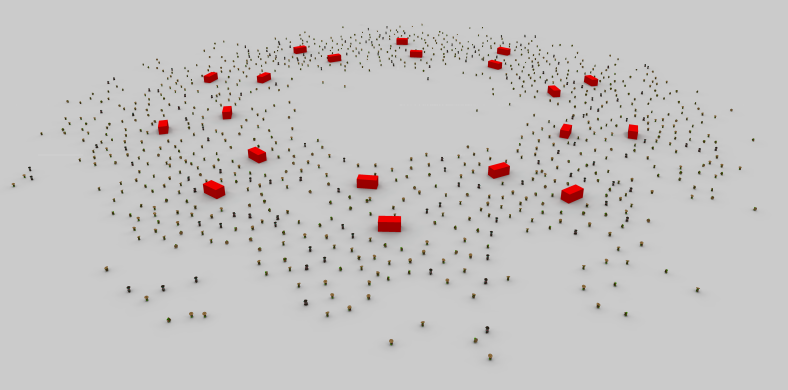
Simulation de foule - Agents évoluant au milieu de mobiles (rouges).
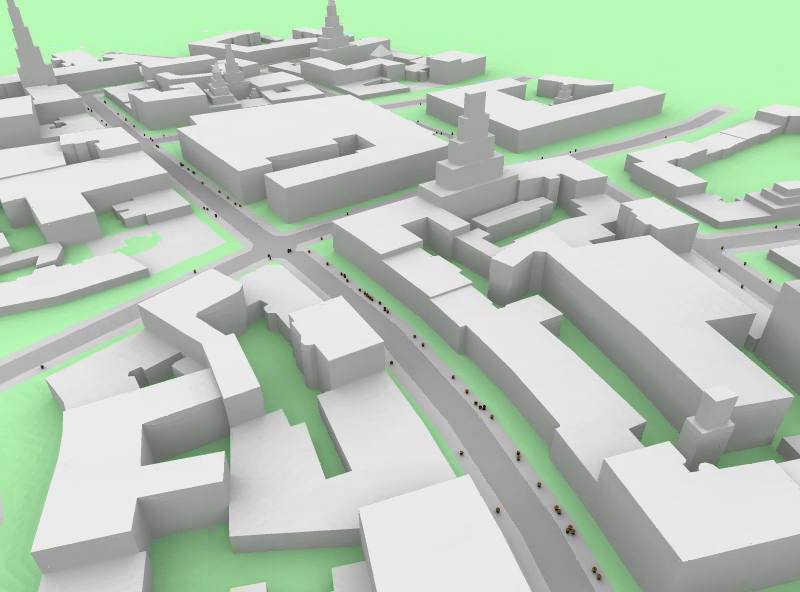
Simulation de foule - Données géographiques importées depuis OpenStreetMap

Simulation de foule - Bâtiment composés d'étages superposés
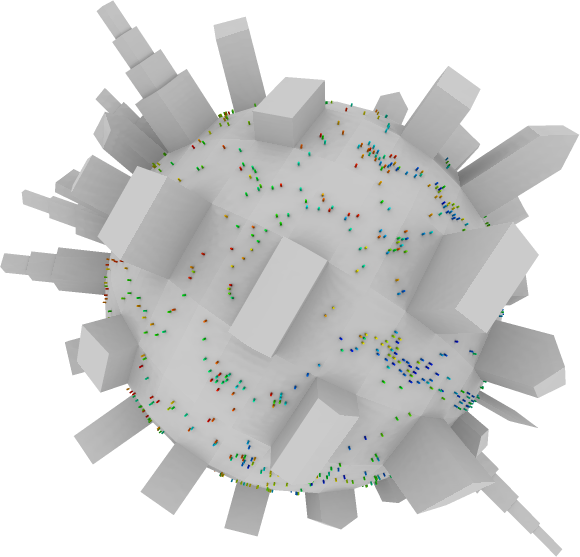
Simulation de foule - Planète virtuelle

Simulation de foule - Support de topologies extrême!
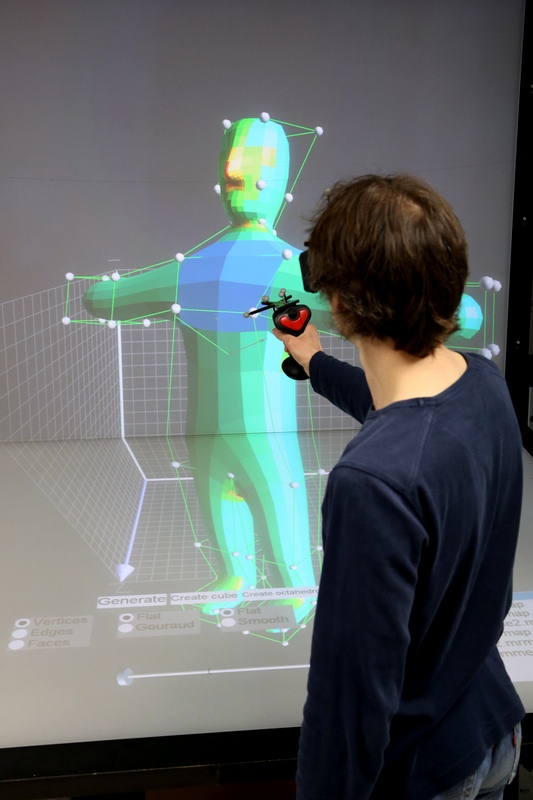
Materiel de réalité virtuelle

Spidar & workbench

Gants & wand

INCA

Effecteur du périphérique haptique
Caméra pour suivi de position
Simulation de découpes et déchirures en temps réel

Vue augmentée d'un objet élastique supportant de fortes déformations et des changements topologiques.

Vue augmentée d'une séquence opératoire en milieu médical.

Vue augmentée d'une séquence opératoire en milieu médical.
Séparation des degrés de liberté pour la manipulation d'objets
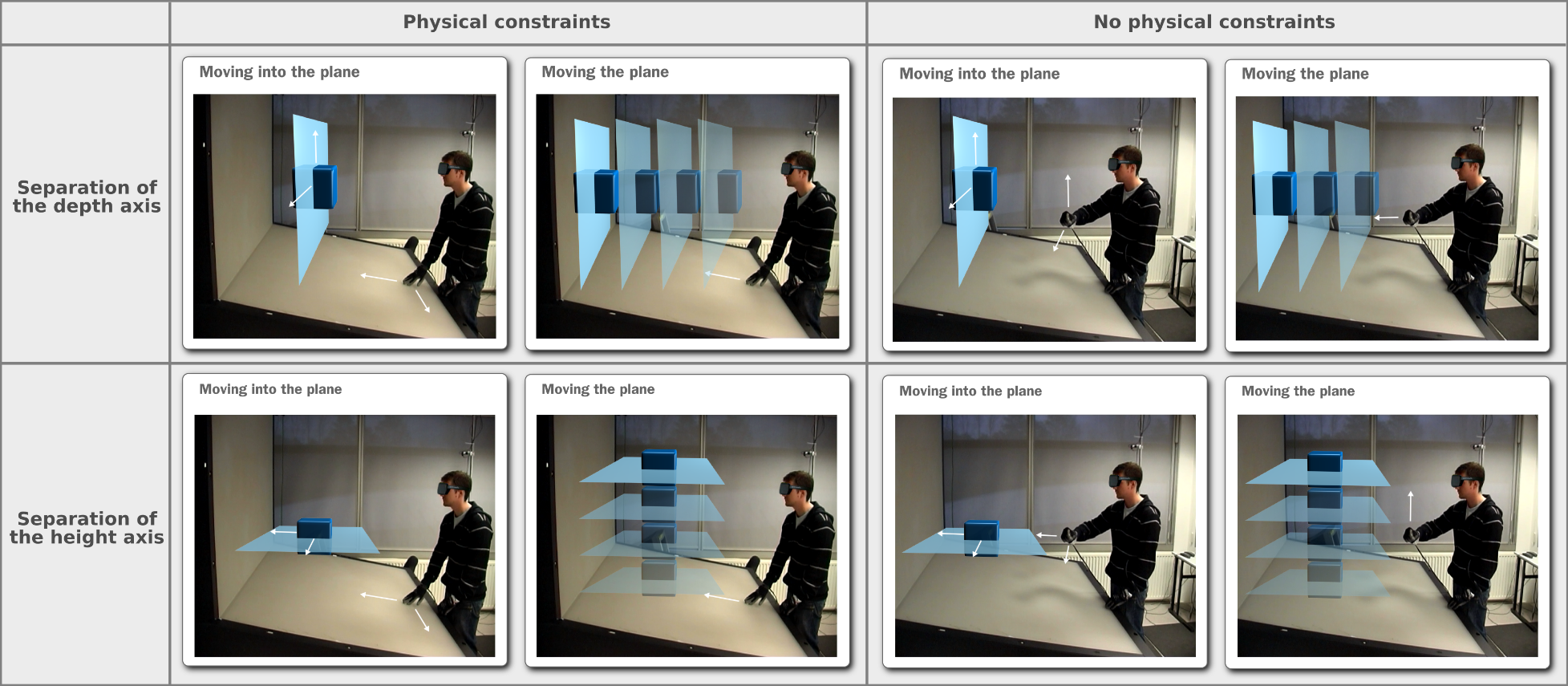
Etude de l'impact de la séparation des degrés de liberté pour l'interaction en environnement immersif.
Facteurs de perception des distances en environnement virtuel
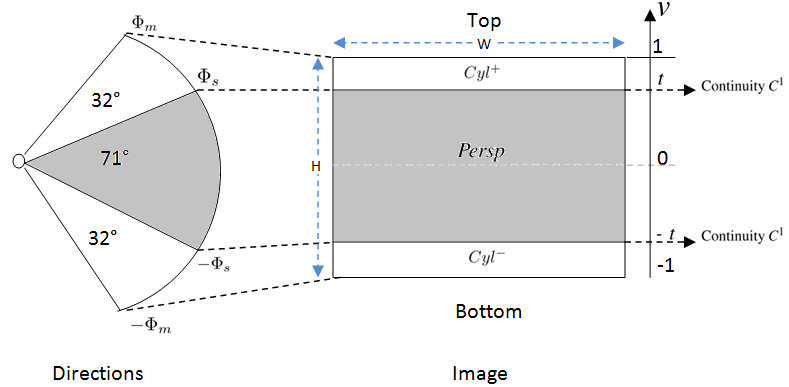
Le principe de la projection hybride et les différents paramètres utilisés pour le rendu de la scène..
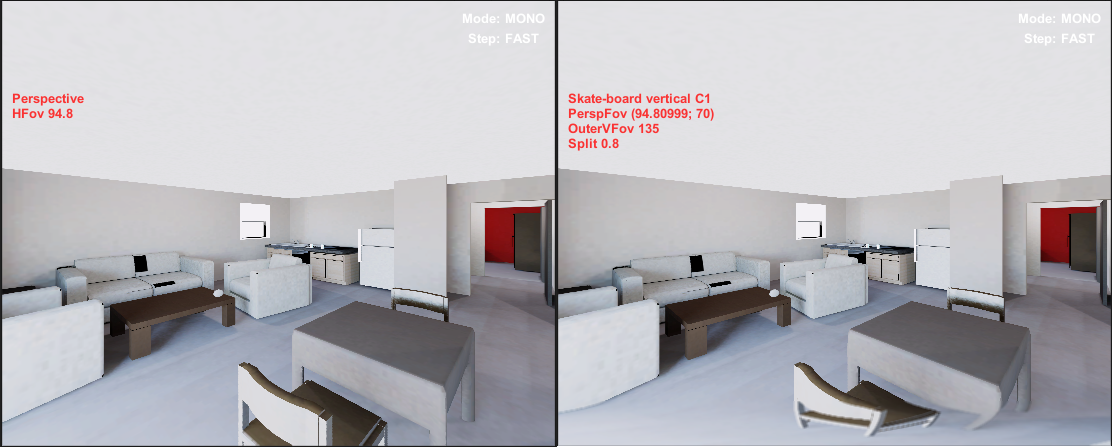
L'image de gauche représente une vue de scène projetée avec la projection perspective ordinaire. L'image de droite montre un exemple la même vue avec la projection hybride. Sur l'image de gauche l'utilisateur ne voit pas les pieds de la chaise devant lui.
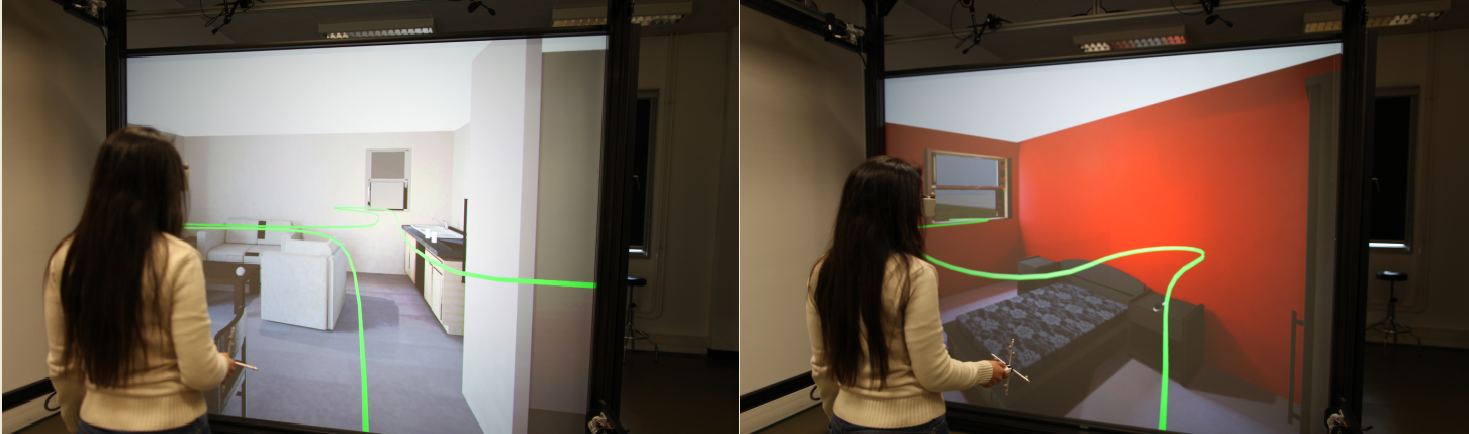
Exemple de visite virtuelle : des positions différentes lors de la visite d'une maison meublée. Le chemin de navigation est représenté en fil d'Ariane en vert.
Apparence et Mouvement
Système de capture de mouvements





Analyse des formes, recalage, et segmentation de données dynamiques
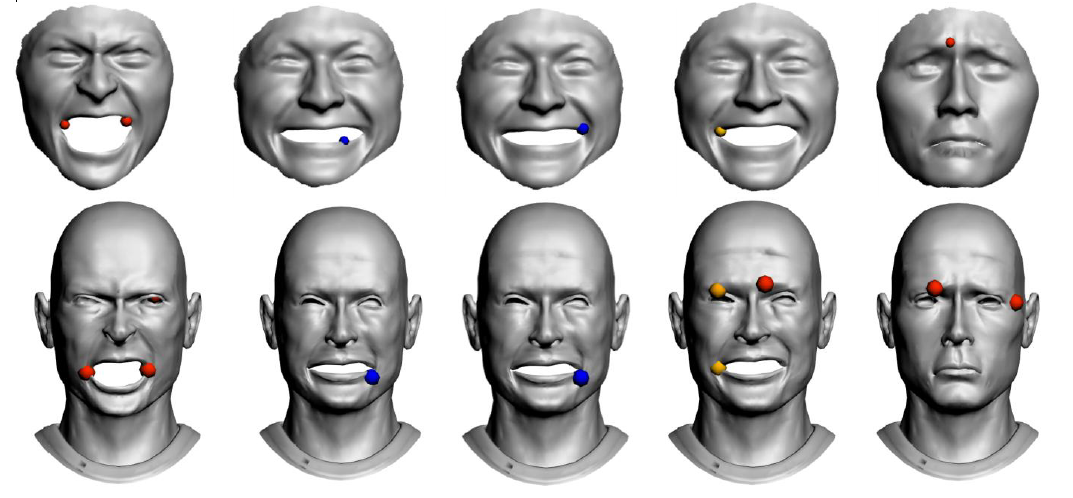 [2-MSC15] Illustration de l'extraction de points caractéristiques détectés à l'aide de notre technique AniM-DoG sur différentes poses de maillages animés. La couleur d'une sphère représente l'échelle temporelle (du bleu au rouge) des points caractéristiques, tandis que son rayon indique l'échelle spatiale. |
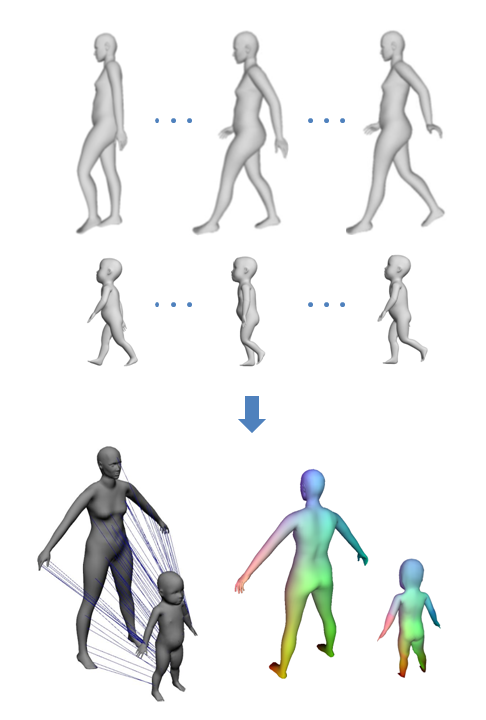 Etant donné un couple de maillages animés présentant des mouvements similaires sémantiquement, nous calculons un ensemble peu dense de points caractéristiques sur chaque maillage, ainsi que les correspondances spatiales entre eux de façon à ce que des points ayant des mouvements similaires soient mis en correspondance. |
Dispositifs de numérisation 3D + apparence

Scanner courte portée à lumière structurée

Scanner laser
moyenne portée
à temps de vol
moyenne portée
à temps de vol

Matériel photographique
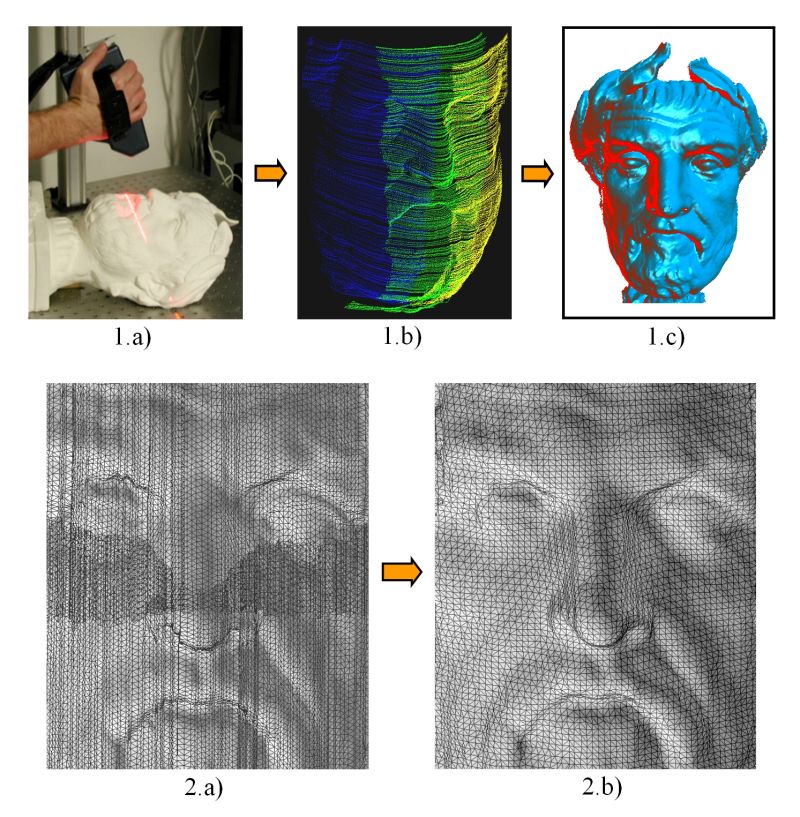
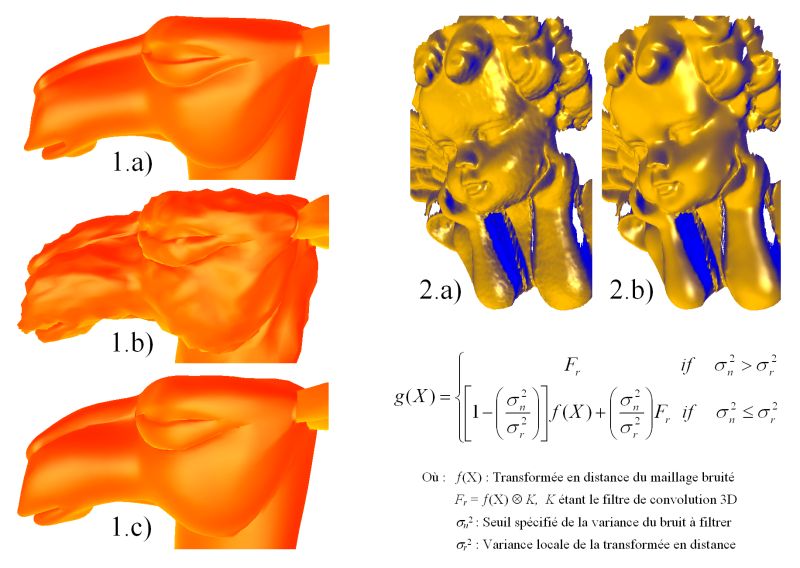
Reconstruction 3D d'objets numérisés par des scanners (Détail)

Chaîne de traîtement pour la reconstruction d'objets 3D à partir de données de numérisation


Reconstruction de l'apparence d'objets numérisés
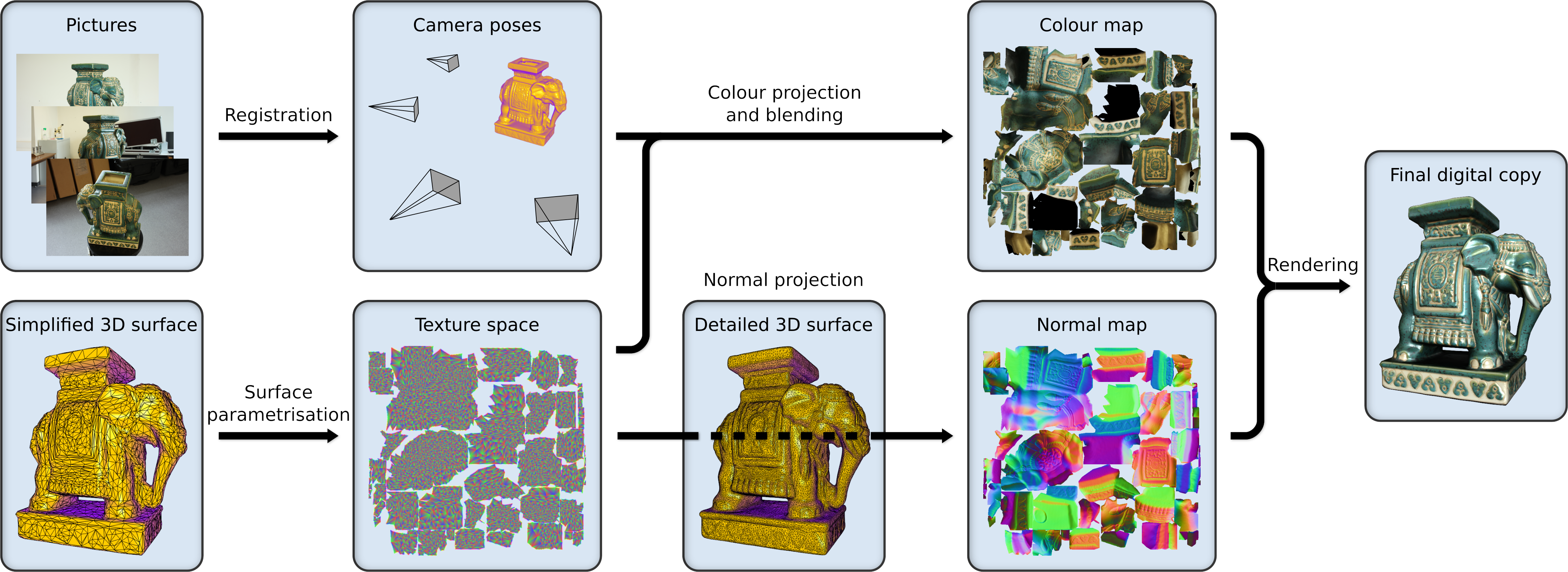
Chaîne de traitement pour le texturage d'objets 3D numérisés à partir d'un ensemble de photographie
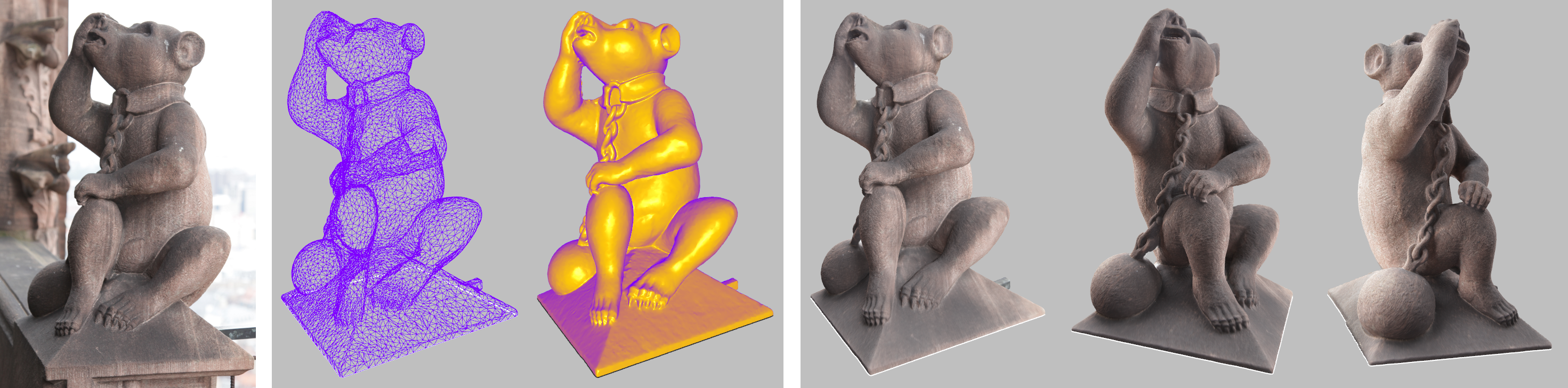
Statue ours, cathédrale de Strasbourg. De gauche à droite: photographie, vues du modèle 3D reconstruit après numérisation de la géométrie (35M de points), vues du modèle 3D texturé après numérisation de l'apparence (55 photographies).
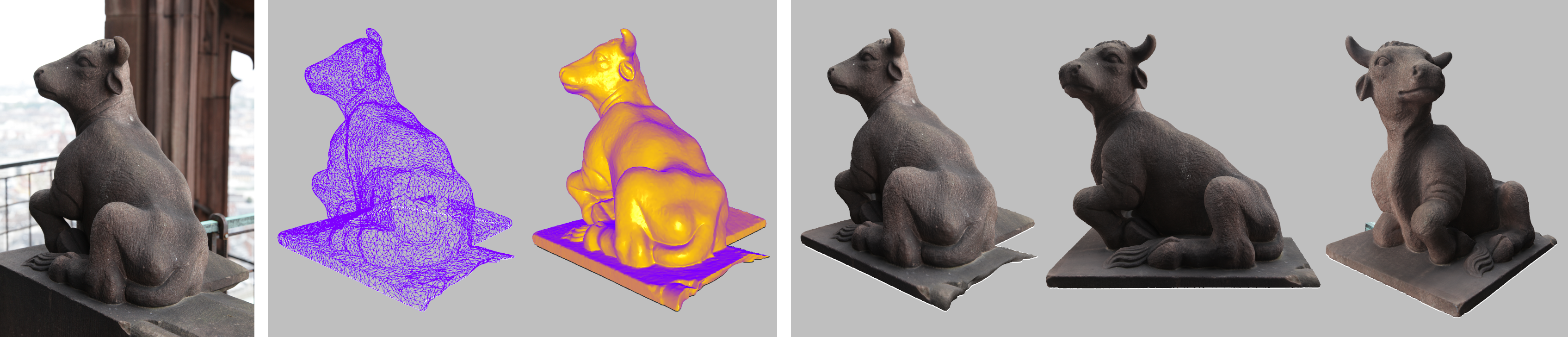
Statue taureau, cathédrale de Strasbourg. De gauche à droite: photographie, vues du modèle 3D reconstruit après numérisation de la géométrie (22M de points), vues du modèle 3D texturé après numérisation de l'apparence (28 photographies).

Copies numériques de trois masques dogons. De gauche à droite: masque adone (antilope), masque kanaga, masque d'un oiseau surmonté d'un dege.

Copie numérique d'une coupe de Hogon (tribu dogon). Assemblée à droite, puis chaque pièce présentée de manière distincte à gauche.

Copies numériques de deux statuettes féminines dege (tribu dogon).

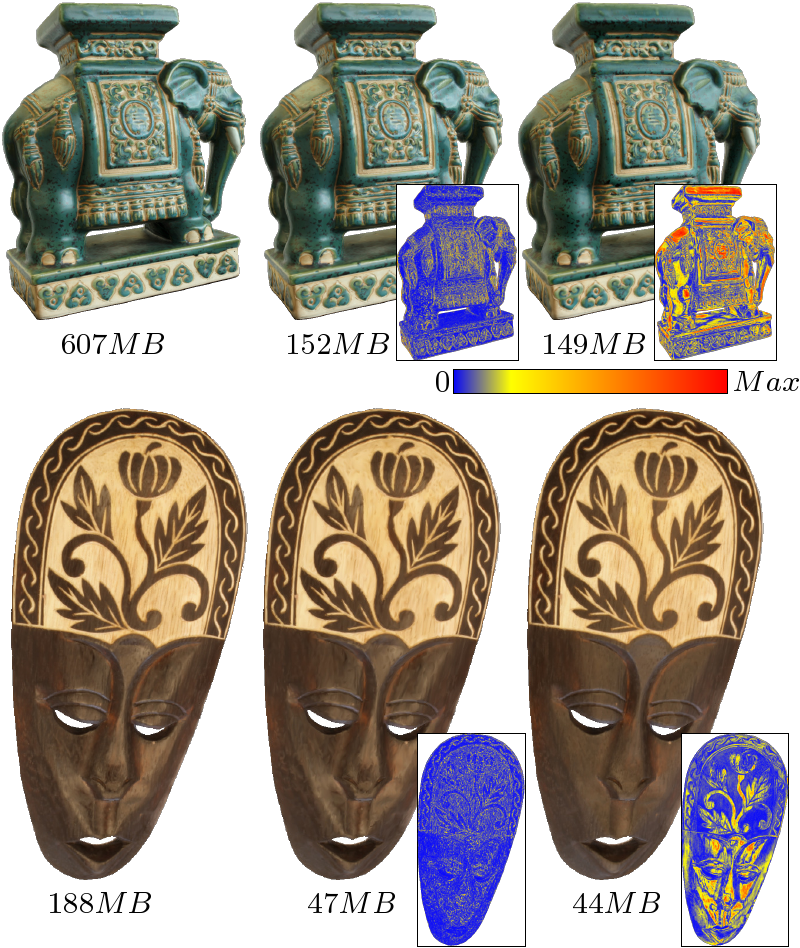
Comparaison entre texture couleur et champ de lumière. Les reflets apparents augmentent le réalisme et permettent de mieux appréhender la nature des matériaux.

Dragon. Géométrie: 18.2M triangles. Texture: champ de lumière.

Mask1. Géométrie: 7.7M triangles. Texture: champ de lumière.

Mask2. Géométrie: 8.7M triangles. Texture: couleur.

[2-VSGL13] Partant d'un ensemble de photos prises à main levée, une représentation virtuelle de l'apparence d'un objet est reconstruite. Cette apparence encode entre autres les effets spéculaires.
[2-VSKL15] Des objets 3D virtuels avec leur apparence sont simplifiés : il s'agit de les alléger en minimisant la perte de qualité visuelle.
Modélisation et synthèse de textures
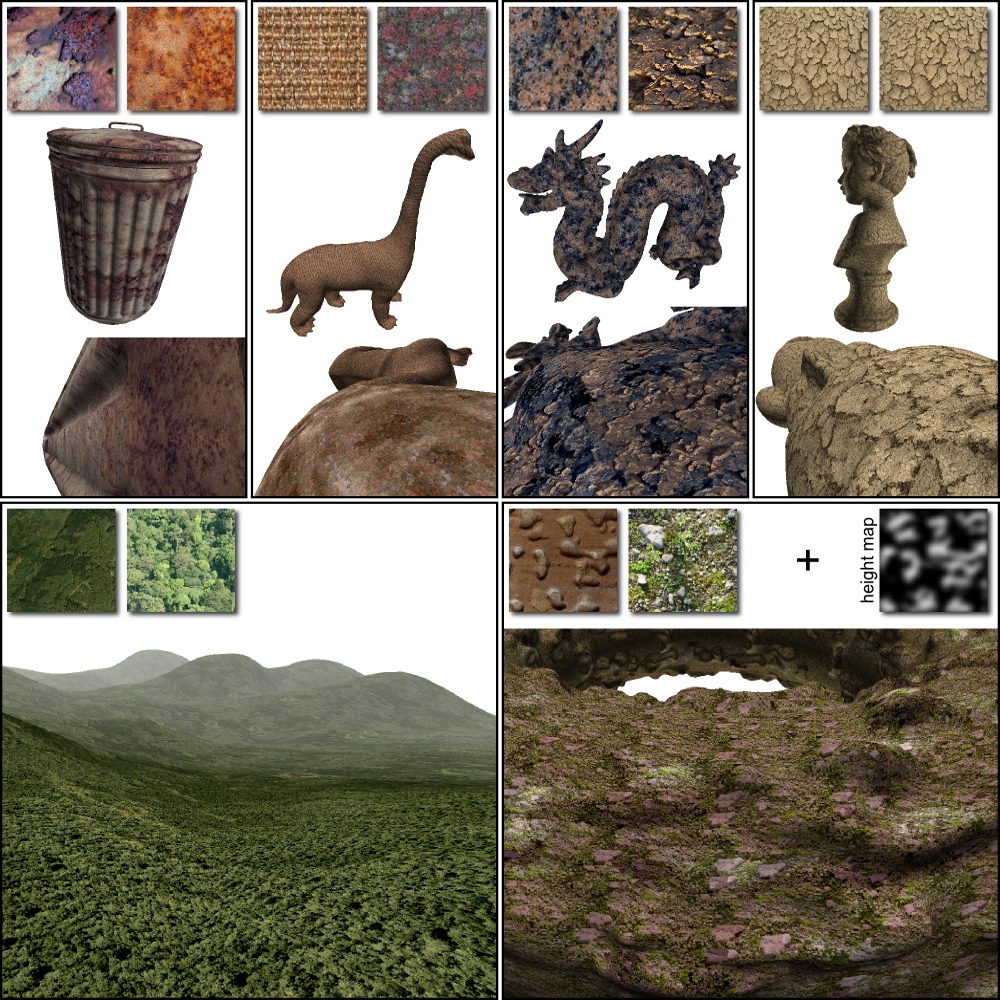
[2-VSLD13] Des textures sont synthétisées à la volée sur GPU, à partir d'échantillons d'exemples à plusieurs échelles.

[2-GSVD14] Des textures sont synthétisées à la volée sur GPU, grâce à une analyse spectrale.
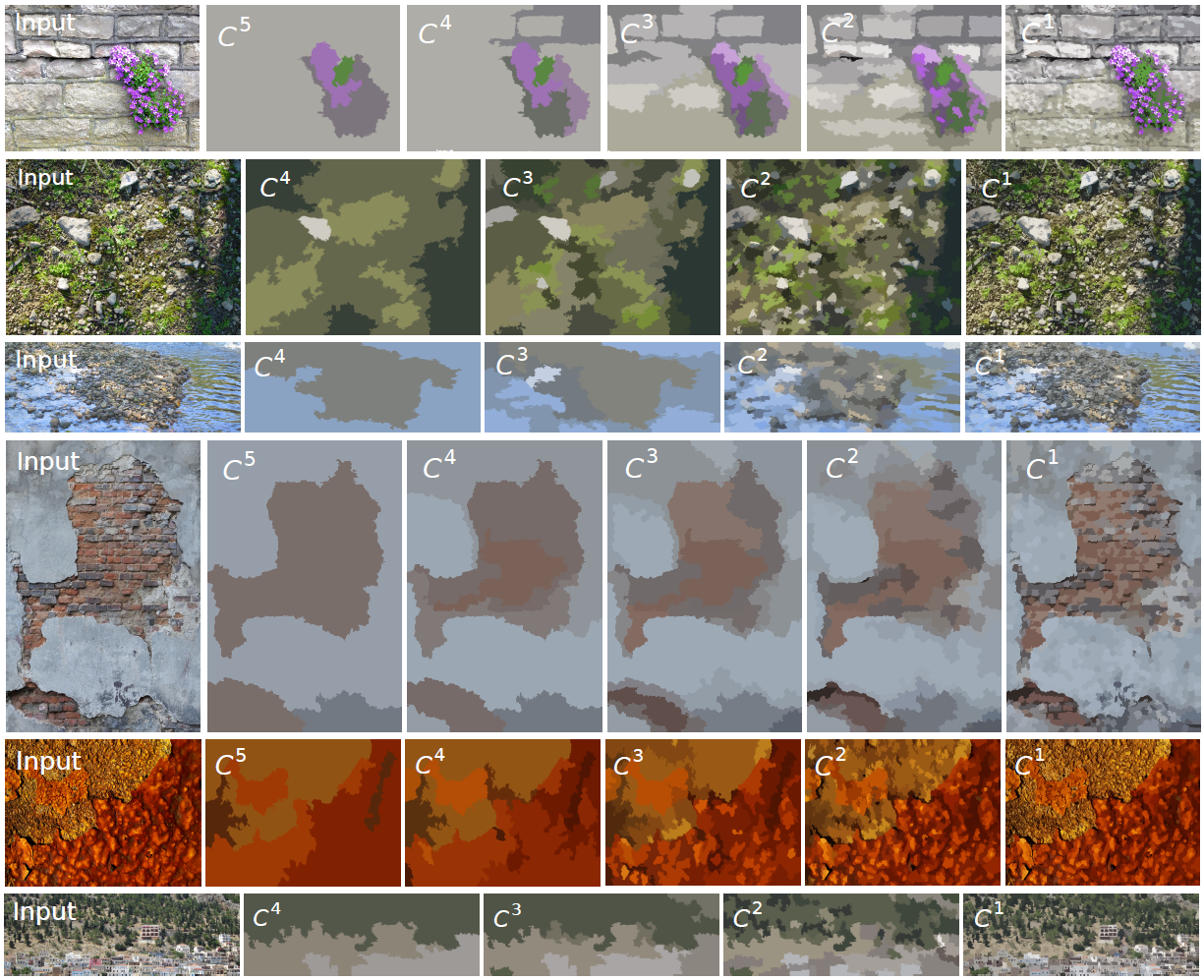
[2-LSAD16] Des cartes de labels multi-échelles sont obtenues à l'aide de notre méthode d'analyse de textures. Une application possible est l'édition interactive de textures.
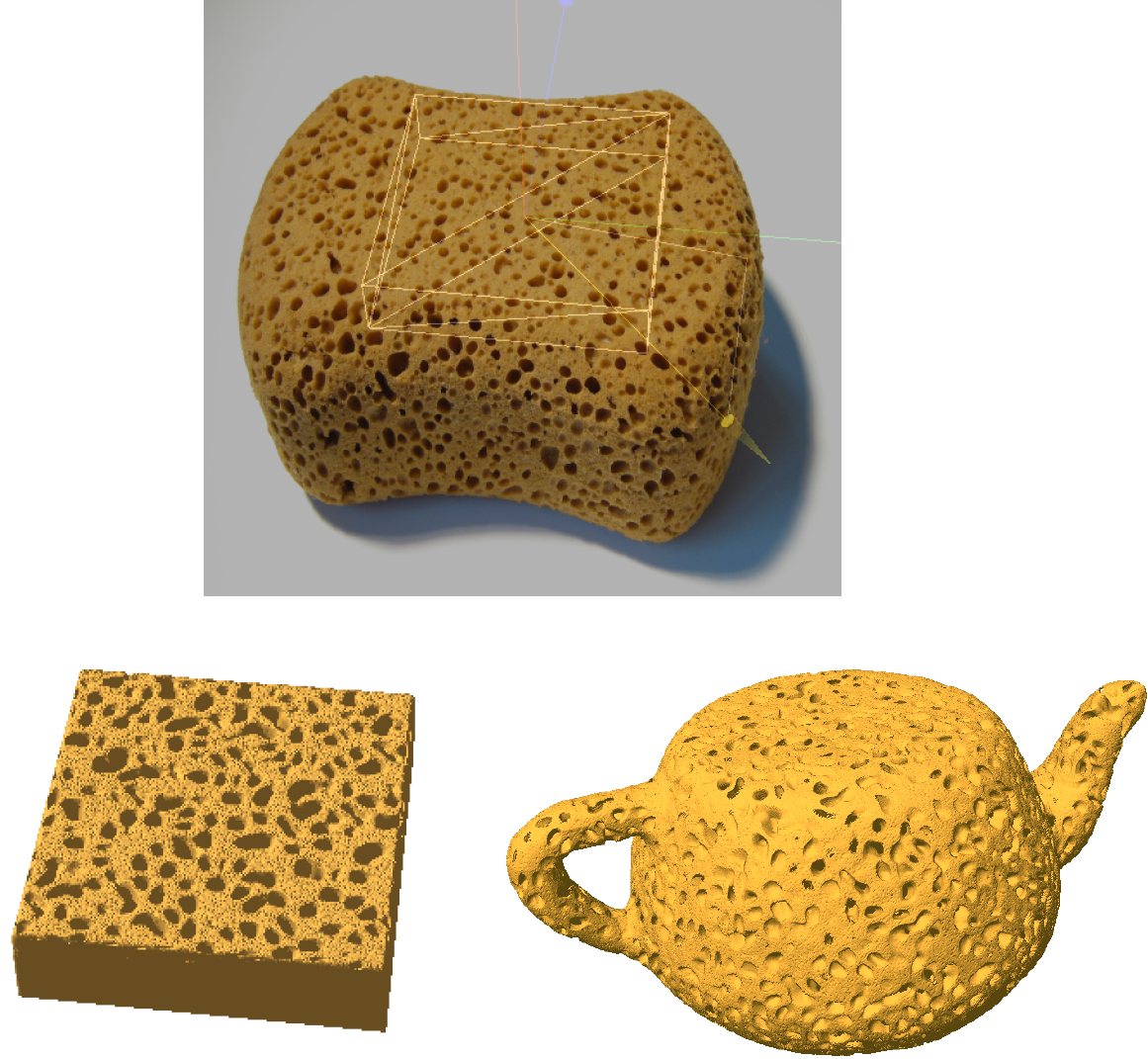
Texture volumique

MegaTexel texture
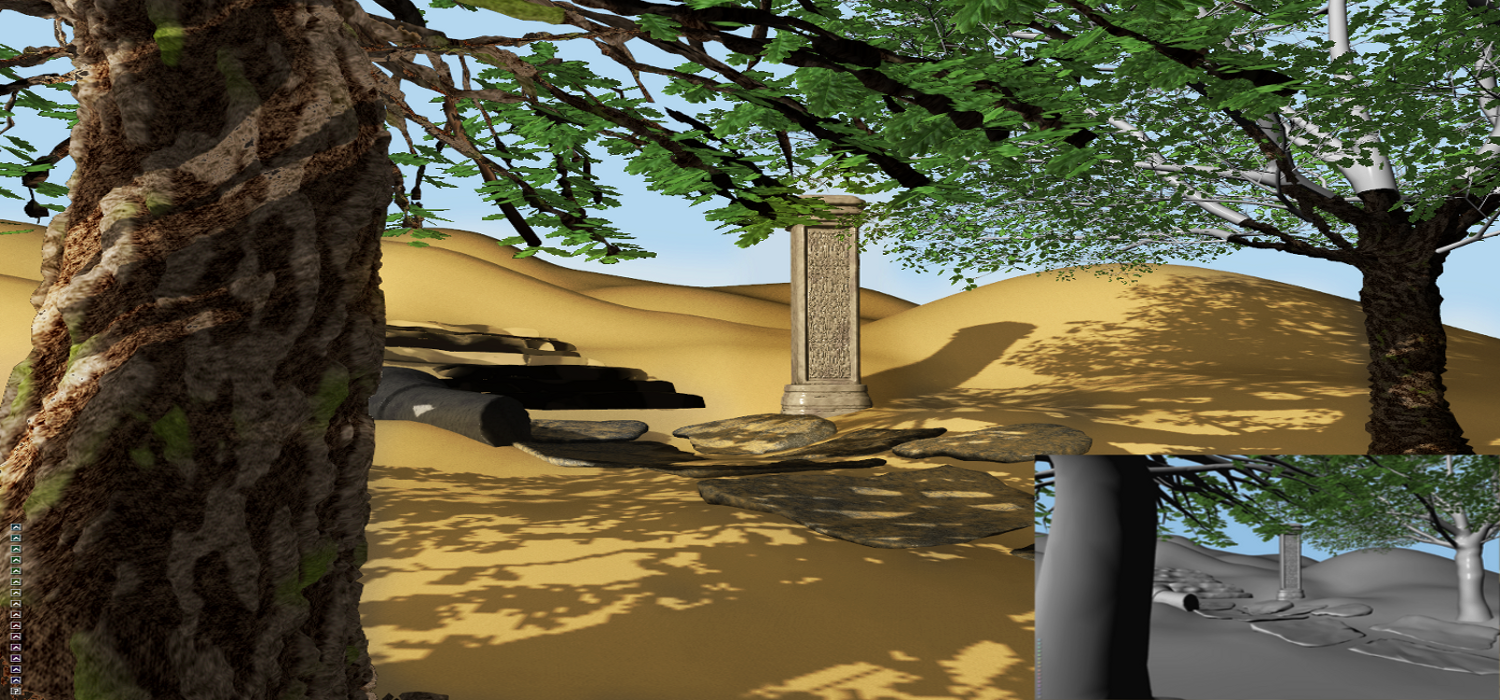
Scène
Précédents travaux
Visualisation
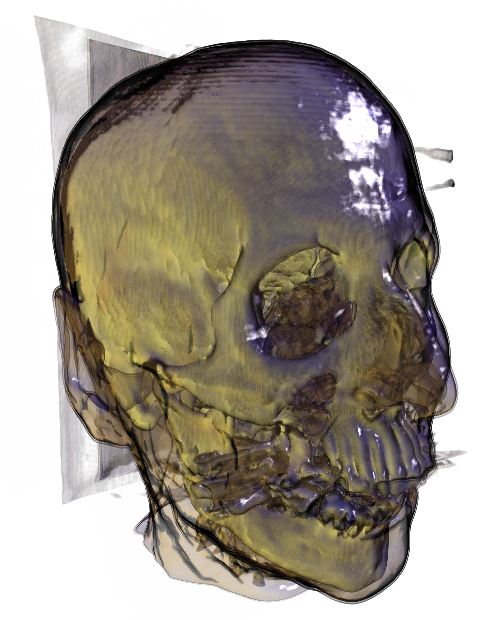
Visualisation volumique

Visualisation volumique

Ambient occlusion
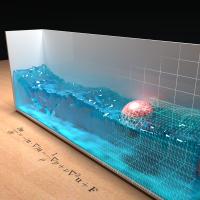
Simulation de fluide

Rendu temps-réel d'objets réfringents
Détection et caractérisation de poches dans les protéines (Détail)

Modèles de déformation
Dogme

Dogme en RV
CFFD
Reconstruction de maillages à partir d'images voxels (Détail)

Lapin
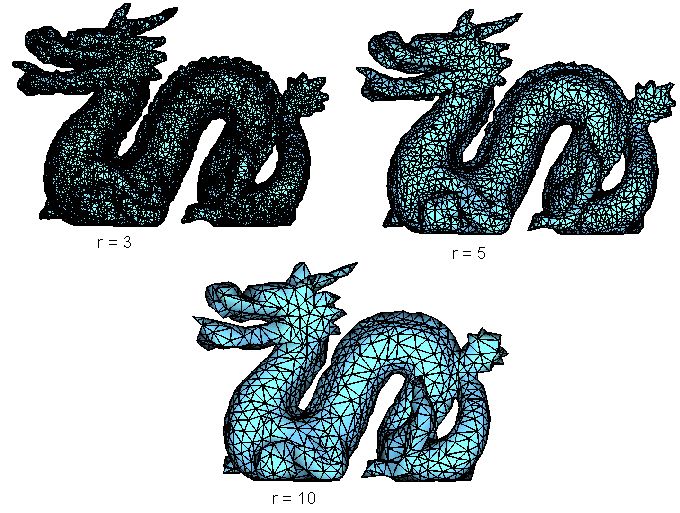
Dragon
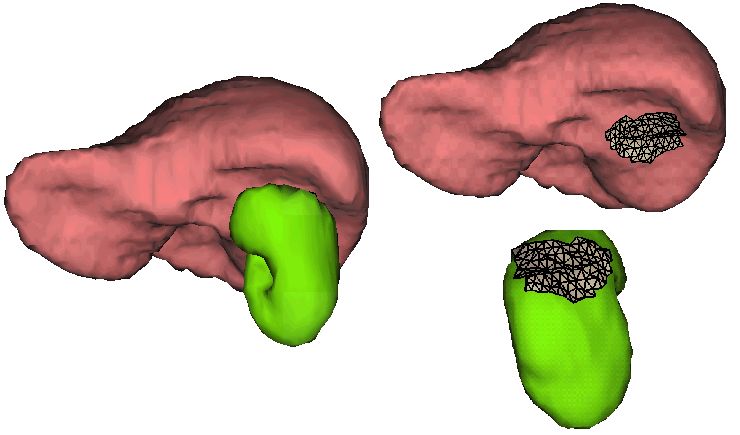
Reconstruction simultanée

Aorte et squelette
Exploration de couches géologiques en environnement immersif


Edition de terrain en environnement immersif

Edition de terrain
Edition de terrain
CCube Menu
Edition de terrain
Edition multi-resolution en environnement immersif



Numérisation d'un bâtiment avec ExRealis